

Điều khiển Dự đoán Mô hình (MPC) đang thay đổi cách quản lý các lò phản ứng sinh học, đặc biệt trong sản xuất thịt nuôi cấy. Không giống như hệ thống PID, phản ứng sau khi thay đổi xảy ra, MPC dự đoán hành vi tương lai, cho phép điều chỉnh chính xác trong thời gian thực. Cách tiếp cận chủ động này giảm thiểu biến động, cải thiện năng suất sản phẩm và đảm bảo tính nhất quán ngay cả ở quy mô lớn.
Những điểm chính:
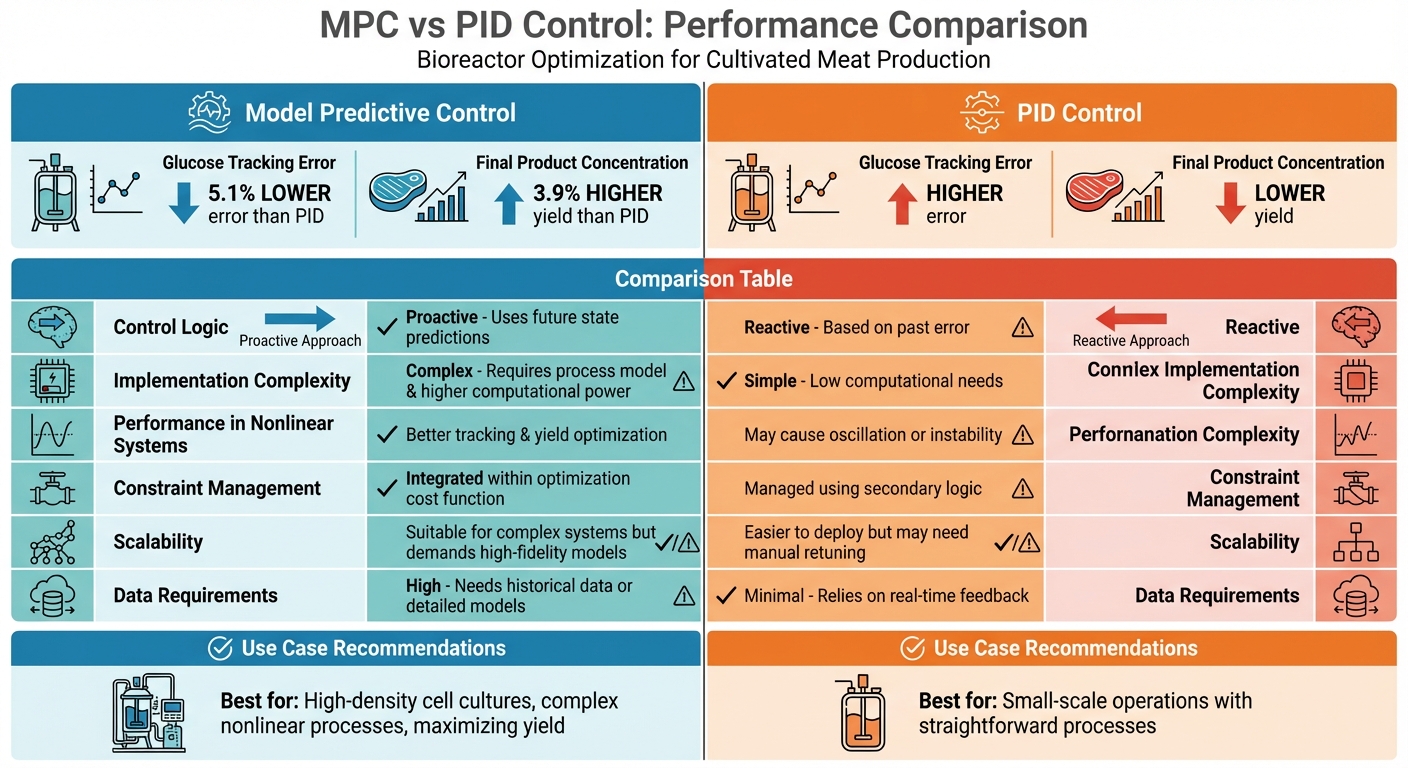
- MPC so với PID: MPC giảm sai số theo dõi glucose 5,1% và cải thiện năng suất protein 3,9% so với hệ thống PID.
- Thách thức với PID: PID gặp khó khăn với các quá trình sinh học phi tuyến tính, độ trễ và điều kiện thay đổi, thường dẫn đến dao động hoặc kém hiệu quả.
- Lợi ích của MPC: Xử lý nhiễu loạn, tối ưu hóa năng suất và hỗ trợ khả năng mở rộng bằng cách tích hợp các công cụ giám sát tiên tiến như quang phổ Raman.
- Thách Thức Triển Khai: MPC yêu cầu các mô hình chính xác và tài nguyên tính toán cao hơn, nhưng các kỹ thuật như điều chỉnh thích ứng và chặn đầu vào giúp giải quyết những thách thức này.
Đối với các nhà sản xuất thịt nuôi cấy, MPC cung cấp một cách mạnh mẽ để quản lý các quy trình sinh học phức tạp, đảm bảo kiểm soát tốt hơn mức độ dinh dưỡng và sự hình thành sản phẩm phụ. Trong khi PID vẫn là một lựa chọn cho các nhiệm vụ đơn giản hơn, MPC ngày càng trở thành lựa chọn ưu tiên cho các hệ thống có khả năng mở rộng và hiệu suất cao.
1. Điều Khiển Dự Báo Mô Hình (MPC)
Hiệu Suất Dưới Sự Nhiễu Loạn
MPC sử dụng các mô hình toán học để dự đoán hành vi trong tương lai, cho phép điều chỉnh các biến điều khiển trong thời gian thực. Điều này làm cho nó đặc biệt hiệu quả trong các lò phản ứng sinh học xử lý các nguồn cấp liệu đầu vào dao động, nhiễu cảm biến và độ trễ trong đo lường.
Vào năm 2021, các nhà nghiên cứu từ Viện Công nghệ Illinois và Amgen đã kiểm tra khả năng xử lý nhiễu loạn của MPC. Họ phát hiện rằng nó cải thiện theo dõi glucose lên 5,1% so với điều khiển tỷ lệ-tích phân (PI) truyền thống khi quản lý sự biến đổi trong nồng độ glucose và glutamine [2]. Trước đó, vào năm 2014, nhóm của Brian Glennon đã áp dụng Điều khiển Dự đoán Mô hình Phi tuyến (NMPC) cho một bioreactor thí điểm 15 lít sử dụng tế bào động vật có vú CHO 320. Bằng cách tích hợp quang phổ Raman Kaiser RXN2 để giám sát glucose mỗi sáu phút, NMPC duy trì một điểm đặt glucose ổn định 11 mM mặc dù có sự biến đổi quy trình đáng kể và nhiễu cảm biến [3].
Các chiến lược MPC mới hơn tiếp tục đẩy giới hạn. Vào tháng 3 năm 2026, Lipe Carmel và Giacomo Sartori đã giới thiệu chiến lược Điều khiển Đa Dòng (MIC) cho quá trình lên men Corynebacterium glutamicum.Cách tiếp cận của họ, điều chỉnh đồng thời đầu vào dinh dưỡng và tỷ lệ pha loãng, đã giảm quá mức 78,0% khi theo dõi các điểm đặt sinh khối là 7,0, 13,0 và 15,7 g/L trong một lần chạy [6].
Những điều chỉnh chủ động này không chỉ ổn định các biến số chính mà còn mở đường cho năng suất tổng thể tốt hơn.
Tối ưu hóa Năng suất
MPC chuyển trọng tâm từ việc chỉ duy trì các điểm đặt trung gian sang tối đa hóa kết quả cuối cùng của lô. Điều này rất quan trọng đối với sản xuất thịt nuôi cấy, nơi đạt được kết quả nhất quán, chất lượng cao ở quy mô lớn là một thách thức lớn.
Ví dụ, nhóm của Mudassir M. Rashid đã chỉ ra rằng một thuật toán điều khiển dự đoán thuộc tính chất lượng quan trọng đã tăng nồng độ sản phẩm lên 3,9% vào cuối quá trình chạy so với các phương pháp thông thường [2]. Tương tự, việc tích hợp các mô hình học máy vào hệ thống MPC đã dẫn đến cải thiện hơn 2% trong sản xuất protein cuối cùng so với mức trung bình lịch sử [1].
Mặc dù kết quả đầy hứa hẹn, việc triển khai MPC đi kèm với những thách thức riêng.
Dễ dàng triển khai
Mặc dù có những lợi thế, việc triển khai MPC trong sản xuất thịt nuôi cấy đòi hỏi phải vượt qua những trở ngại đáng kể. Hiệu quả của hệ thống phụ thuộc vào các mô hình toán học chính xác nắm bắt được sự phức tạp của động lực học bioreactor. Như Touraj Eslami và Alois Jungbauer giải thích:
"Hiệu quả của bất kỳ thiết kế phản hồi nào đều bị giới hạn cơ bản bởi động lực học hệ thống và độ chính xác của mô hình" [8].
Các mô hình phi tuyến, mặc dù mạnh mẽ, đòi hỏi tài nguyên tính toán cao và có thể gây ra sự chậm trễ trong tối ưu hóa thời gian thực [8]. Ngoài ra, tối ưu hóa phi tuyến của MPC có thể dẫn đến cực tiểu cục bộ, làm giảm hiệu suất nếu không được khởi tạo đúng cách [3]. Konstantins Dubencovs và các đồng nghiệp nhấn mạnh tính hữu dụng thực tiễn của nó:
"MPC thực tế là phương pháp duy nhất có thể sử dụng các mô hình toán học trong việc điều khiển các quy trình công nghệ sinh học bằng thiết bị PC tiêu chuẩn" [4].
Các chiến lược MPC thích ứng cung cấp giải pháp bằng cách tự động điều chỉnh các thông số điều khiển để giải quyết sự biến đổi sinh học [4] [5]. Tích hợp Công nghệ Phân tích Quy trình (PAT), chẳng hạn như quang phổ Raman để giám sát thường xuyên, giảm nhu cầu về cơ sở hạ tầng máy tính chuyên dụng [8] [3]. Các kỹ thuật như 'chặn đầu vào', nhóm thời gian thành các khối, cũng giúp quản lý tải tính toán [8].
Khả năng mở rộng cho Sản xuất Thịt Nuôi Cấy
Khả năng của MPC trong việc quản lý các nhiễu loạn và tối ưu hóa sản lượng làm cho nó trở thành ứng cử viên mạnh mẽ để mở rộng sản xuất thịt nuôi cấy. Nó đã chứng minh được khả năng của mình trong các quy trình dược phẩm sinh học và vi sinh, nơi nó đáp ứng các yêu cầu nghiêm ngặt của quy trình [1]. Đối với các hoạt động quy mô lớn, MPC giải quyết các thách thức như chuyển khối lượng và nhiệt bằng cách điều chỉnh nguồn cấp chất nền để đảm bảo trộn lẫn, mức oxy và làm mát đúng cách [5].
Lợi ích rõ ràng: kiểm soát dinh dưỡng dựa trên phản hồi đã tăng cường độ kháng thể đơn dòng lên 1,7 lần, trong khi các chiến lược dự đoán đã ngăn chặn mất mát sản phẩm từ 4,5–10% trong 30 ngày [3] [7]. Brian Glennon tóm tắt một cách chính xác tình trạng hiện tại:
"Kiểm soát các quy trình sinh học đang ở giai đoạn sơ khai so với các ngành hóa học và dược phẩm truyền thống... một phần do những thách thức liên quan đến kiểm soát bioreactor: hiểu biết kém về quy trình [và] thiếu đo lường các thông số quy trình liên quan" [3].
Ngay cả với những thách thức này, tích hợp học máy vào các mô hình dự báo MPC cung cấp một hướng đi phía trước. Những tiến bộ này giúp bù đắp cho sự thiếu vắng của các mô hình nguyên lý đầu tiên có độ trung thực cao, làm cho MPC ngày càng phù hợp với các yêu cầu phức tạp của sản xuất thịt nuôi cấy [1]. Đối với các công ty trong lĩnh vực này, các nền tảng như
2.Điều khiển PID và Các Phương Pháp Truyền Thống Khác
Hiệu Suất Dưới Ảnh Hưởng Của Nhiễu Loạn
Trong khi Điều Khiển Dự Báo Mô Hình (MPC) vượt trội trong việc dự đoán thay đổi, các bộ điều khiển PID (tỷ lệ-tích phân-đạo hàm) truyền thống có những nhược điểm đáng chú ý. Các bộ điều khiển PID, được sử dụng rộng rãi trong công nghệ sinh học, hoạt động theo cách phản ứng, nghĩa là chúng chỉ phản ứng sau khi xảy ra sai lệch. Cách tiếp cận phản ứng này gặp khó khăn với tính phi tuyến và bản chất phụ thuộc thời gian của các quá trình sinh học, làm cho PID kém hiệu quả trong các môi trường như vậy [5][9].
Một vấn đề chính là các hệ thống PID với các tham số điều chỉnh cố định thường không duy trì được sự ổn định khi động lực học của quá trình thay đổi đáng kể trong một chu kỳ nuôi cấy [5]. Ví dụ, trong các nền văn hóa tế bào động vật có vú, sự chậm trễ trong đo lường - đôi khi kéo dài đến 24 giờ - làm giảm hiệu quả của PID [3]. Những sự chậm trễ này ngăn cản việc điều chỉnh kịp thời, dẫn đến dao động hoặc lỗi tĩnh trong các môi trường phi tuyến tính cao [3].
Khoảng cách hiệu suất giữa PID và MPC được hỗ trợ bởi dữ liệu. Trong một nghiên cứu năm 2021 của Mudassir M. Rashid, Satish J. Parulekar, và Ali Cinar, các hệ thống PID cho thấy lỗi theo dõi cao hơn 5,1% đối với các điểm đặt nồng độ glucose so với MPC trong điều kiện có nhiễu không xác định và nhiễu đo lường [2]. Thêm vào đó, tín hiệu PID thường bị biến dạng bởi nhiễu từ quá trình sục khí, bọt và trộn trong bioreactor [5].
Tối ưu hóa Năng suất
Một trong những thách thức cốt lõi của PID là không có khả năng dự đoán sự thay đổi chuyển hóa hoặc thích ứng với sự thay đổi trong nồng độ chất nền quan trọng. Hạn chế này thường dẫn đến các vấn đề như "chuyển hóa tràn", nơi mà chất nền dư thừa dẫn đến các sản phẩm phụ ức chế như acetate trong E.coli hoặc lactate và ammonia trong tế bào động vật có vú [5].
Trong nuôi cấy tế bào động vật có vú - chìa khóa cho sản xuất thịt nuôi cấy - các phương pháp cho ăn truyền thống không duy trì được nồng độ dinh dưỡng thấp cần thiết để tránh các sản phẩm phụ này. Ví dụ, kiểm soát mức glucose và glutamine ở 0.3 mM và 0.5 mM, tương ứng, có thể giảm đáng kể các sản phẩm phụ ức chế, cắt giảm ammonia 74% và lactate 63% [3]. Tuy nhiên, đạt được mức độ chính xác này vượt quá khả năng của các hệ thống PID tiêu chuẩn.
Brian Glennon tóm tắt thách thức:
"Kiểm soát các quy trình sinh học đang ở giai đoạn sơ khai...do những thách thức liên quan đến kiểm soát bioreactor: hiểu biết kém về quy trình, thiếu đo lường các thông số quy trình liên quan và những khó khăn vốn có trong việc kiểm soát các quy trình sinh học vốn động, phức tạp và phi tuyến tính" [3].
Dễ Dàng Triển Khai
Mặc dù có những hạn chế, PID vẫn phổ biến do tính đơn giản của nó. Nó yêu cầu sức mạnh tính toán tối thiểu và có thể được triển khai với thiết bị tiêu chuẩn [5]. Hầu hết các thiết lập dựa vào cơ chế phản hồi gián tiếp, như pH-stat (điều chỉnh cho sự thay đổi pH từ tiêu thụ dinh dưỡng) hoặc DO-stat (phản ứng với sự tăng đột biến oxy hòa tan khi các chất nền cạn kiệt). Tuy nhiên, việc mở rộng hệ thống PID bị cản trở bởi thiếu các cảm biến trực tuyến đáng tin cậy để đo trực tiếp nồng độ sinh khối hoặc chất nền [5].
Trong nhiều cơ sở quy mô nhỏ đến trung bình, việc điều chỉnh thủ công các hồ sơ cho ăn - thường được thực hiện theo khoảng thời gian 24 giờ - vẫn còn phổ biến. Cách tiếp cận này đi ngược lại với sáng kiến Công nghệ Phân tích Quy trình (PAT) của FDA, khuyến khích kiểm soát tự động, theo thời gian thực [4]. Những can thiệp thủ công này càng làm nổi bật những thách thức trong việc triển khai PID một cách có thể mở rộng và hiệu quả.
Khả năng mở rộng cho Sản xuất Thịt Nuôi Cấy
Khi sản xuất mở rộng, những hạn chế của PID trở nên rõ ràng hơn. Các quy trình sinh học quy mô lớn đòi hỏi điều chỉnh chính xác việc cho ăn chất nền để quản lý các yếu tố như chuyển khối, trộn, truyền nhiệt và oxy hóa [5]. Các tham số điều chỉnh cố định không thể xử lý các biến động quy trình đáng kể xảy ra trong các lần lên men [5]. Behzad Moshiri chỉ ra:
"Các phương pháp điều khiển thông thường không thành công trong nhiệm vụ như vậy [điều khiển các quy trình sinh học]... chúng thường không đủ cho các lò phản ứng sinh học phi tuyến tính không ổn định cao" [9].
Ví dụ, trong các nghiên cứu liên quan đến sản xuất penicillin, tính chất phi tuyến tính và không ổn định cao của các quy trình sinh học đã khiến các hệ thống PID truyền thống thất bại trong việc duy trì theo dõi điểm đặt hiệu quả [9].
Trong sản xuất thịt nuôi cấy, nơi mà sự nhất quán và tối ưu hóa năng suất là rất quan trọng, những hạn chế này đặt ra những thách thức lớn. Mặc dù PID có thể xử lý các nhiệm vụ đơn giản hơn như kiểm soát pH hoặc oxy hòa tan, nhưng tính chất phản ứng và không có khả năng quản lý động lực học dinh dưỡng phức tạp, quy mô lớn khiến nó không phù hợp với các yêu cầu tiên tiến của hệ thống sản xuất thịt nuôi cấy.
Điều khiển Dự đoán Mô hình
sbb-itb-ffee270
Ưu điểm và Nhược điểm
So sánh Hiệu suất Hệ thống Điều khiển MPC và PID trong Bioreactor
Mở rộng từ các so sánh hiệu suất trước đó, phần này xem xét ưu và nhược điểm của việc sử dụng Điều khiển Dự đoán Mô hình (MPC) so với điều khiển Tỷ lệ-Tích phân-Đạo hàm (PID) để tối ưu hóa bioreactor.
Trong các bioreactor nuôi cấy tế bào động vật có vú theo mẻ, MPC vượt trội hơn các thuật toán PI truyền thống bằng cách giảm lỗi theo dõi điểm đặt nồng độ glucose 5,1% và tăng nồng độ sản phẩm cuối cùng 3,9%[2] . Khả năng dự đoán này đặc biệt quan trọng trong các hệ thống thịt nuôi cấy, nơi duy trì mức dinh dưỡng chính xác ngăn chặn sự hình thành các sản phẩm phụ ức chế.
Sự khác biệt cơ bản giữa hai chiến lược này là cách tiếp cận của chúng đối với việc kiểm soát. Điều khiển PID là phản ứng, chỉ giải quyết các sai lệch sau khi chúng xảy ra. Ngược lại, MPC là chủ động, sử dụng mô hình quy trình để dự đoán hành vi trong tương lai và điều chỉnh đầu vào cho phù hợp. Tuy nhiên, hiệu suất cải thiện này đi kèm với một số đánh đổi.
MPC yêu cầu mô hình hóa quy trình chi tiết và tài nguyên tính toán lớn hơn, trong khi bộ điều khiển PID đơn giản hơn để triển khai. Hệ thống PID có thể chạy trên các Bộ Điều Khiển Logic Lập Trình (PLC) tiêu chuẩn với mô hình hóa tối thiểu, trong khi MPC cần một máy tính tích hợp với bộ điều khiển quy trình sinh học[3][4]. Konstantins Dubencovs từ Viện Hóa học Gỗ Quốc gia Latvia ghi chú:
"MPC thực tế là phương pháp duy nhất có thể cung cấp việc sử dụng các mô hình toán học trong việc kiểm soát các quy trình công nghệ sinh học bằng cách sử dụng thiết bị PC tiêu chuẩn."[4]
Đây là sự so sánh song song của hai phương pháp:
| Tính năng | Điều khiển PID truyền thống | Điều khiển dự đoán mô hình (MPC) |
|---|---|---|
| Logic điều khiển | Phản ứng; dựa trên lỗi quá khứ | Chủ động; sử dụng dự đoán trạng thái tương lai |
| Độ phức tạp triển khai | Đơn giản; nhu cầu tính toán thấp | Phức tạp; yêu cầu mô hình quy trình và sức mạnh tính toán cao hơn |
| Hiệu suất trong hệ thống phi tuyến tính | Có thể gây dao động hoặc không ổn định | Cung cấp theo dõi tốt hơn và tối ưu hóa năng suất |
| Quản lý ràng buộc | Quản lý bằng logic thứ cấp | Tích hợp trong hàm chi phí tối ưu hóa |
| Khả năng mở rộng | Dễ triển khai nhưng có thể cần điều chỉnh lại thủ công | Phù hợp cho các hệ thống phức tạp nhưng đòi hỏi các mô hình độ chính xác cao |
| Yêu cầu dữ liệu | Tối thiểu; dựa vào phản hồi thời gian thực | Cao; cần dữ liệu lịch sử hoặc mô hình chi tiết |
Những so sánh này nhấn mạnh sự đánh đổi giữa sự đơn giản và hiệu suất.Sự lựa chọn giữa PID và MPC phụ thuộc phần lớn vào quy mô hoạt động và các nguồn lực kỹ thuật có sẵn.
Kết luận
Điều khiển Dự đoán Mô hình (MPC) mang lại lợi thế rõ ràng so với các hệ thống PID truyền thống trong việc tối ưu hóa hiệu suất của bioreactor, đặc biệt là trong sản xuất thịt nuôi cấy. Trong lĩnh vực này, nơi mà việc kiểm soát môi trường chính xác ảnh hưởng trực tiếp đến chất lượng và sản lượng sản phẩm, MPC mang lại những lợi ích có thể đo lường được. Ví dụ, nó cải thiện độ chính xác theo dõi glucose lên 5,1% và tăng nồng độ sản phẩm cuối cùng lên 3,9% so với các phương pháp thông thường[2]. Khả năng dự đoán này đặc biệt quan trọng trong các nền văn hóa tế bào mật độ cao, nơi duy trì cân bằng dinh dưỡng ngăn ngừa sự tích tụ của các sản phẩm phụ có hại.
MPC là giải pháp hàng đầu khi tối đa hóa sản lượng hoặc quản lý các quy trình phức tạp, phi tuyến tính.Nó vượt trội trong việc xử lý sự biến đổi cao, nhiễu đo lường, hoặc khoảng thời gian lấy mẫu kéo dài, mang lại mức độ bền vững mà hệ thống PID đơn giản không thể sánh kịp. Tuy nhiên, đối với các hoạt động quy mô nhỏ với quy trình đơn giản, điều khiển PID có thể vẫn là lựa chọn tiết kiệm chi phí hơn. Sự tương phản giữa cách tiếp cận chủ động của MPC và bản chất phản ứng của điều khiển PID làm nổi bật giá trị chiến lược của nó trong sản xuất thịt nuôi cấy hiệu suất cao.
Những tiến bộ trong sức mạnh tính toán và các công cụ như Công nghệ Phân tích Quy trình (e.g. , quang phổ Raman và cảm biến NIR) đã làm cho việc triển khai MPC trở nên dễ tiếp cận hơn. Những công nghệ này cho phép tối ưu hóa thời gian thực bằng cách sử dụng các thiết lập phần cứng tiêu chuẩn, giảm rào cản cho việc áp dụng[5].
Đối với các nhà sản xuất thịt nuôi cấy, việc tìm nguồn cung cấp cảm biến bioreactor chuyên dụng, thiết bị phân tích và thiết bị điều khiển là rất quan trọng để tích hợp MPC thành công.Các nền tảng như
MPC đại diện cho một sự chuyển đổi quan trọng trong kiểm soát bioreactor, chuyển từ các hệ thống phản ứng sang một phương pháp "chất lượng theo thiết kế" dự đoán. Khi sản xuất thịt nuôi cấy mở rộng từ phòng thí nghiệm đến các hoạt động thương mại, MPC sẽ đóng vai trò thiết yếu trong việc duy trì chất lượng sản phẩm nhất quán đồng thời thúc đẩy hiệu quả hoạt động. Sự phát triển này đánh dấu một bước tiến quan trọng trong sản xuất sinh học [3].
Câu hỏi thường gặp
Dữ liệu và cảm biến nào cần thiết để chạy MPC trong một bioreactor?
Chạy Kiểm soát Dự đoán Mô hình (MPC) trong một bioreactor liên quan đến việc sử dụng các cảm biến để theo dõi các biến số quy trình quan trọng. Những yếu tố này bao gồm nồng độ chất nền (như glucose), mức độ oxy hòa tan, pH, nhiệt độ và đo lường sinh khối.Để duy trì kiểm soát chính xác và hiệu quả, các hệ thống thu thập dữ liệu thời gian thực là cần thiết để liên tục giám sát các biến số này.
Làm thế nào để xây dựng và xác thực một mô hình MPC cho các nền văn hóa tế bào phi tuyến tính?
Phát triển và xác thực một mô hình MPC cho các nền văn hóa tế bào phi tuyến tính bắt đầu bằng việc tạo ra một mô hình quy trình chính xác. Điều này có thể được thực hiện bằng cách sử dụng các phương trình nguyên tắc đầu tiên hoặc tận dụng các kỹ thuật học máy. Bước tiếp theo là xác thực mô hình này bằng cách so sánh các dự đoán của nó với dữ liệu thực nghiệm từ các lò phản ứng sinh học. Bất kỳ sự khác biệt nào cũng được giải quyết bằng cách điều chỉnh các thông số mô hình để cải thiện độ chính xác.
Một khi mô hình được tích hợp vào khung MPC, bộ điều khiển sẽ trải qua thử nghiệm trong các lò phản ứng sinh học. Thông qua các điều chỉnh lặp đi lặp lại, hệ thống được tinh chỉnh để thiết lập các chiến lược cho ăn tối ưu hóa hiệu suất trong khi vẫn nằm trong các ràng buộc quy trình yêu cầu.
Khi nào PID vẫn là lựa chọn tốt hơn so với MPC trong sản xuất thịt nuôi cấy?
Điều khiển dự đoán mô hình (MPC) rất hiệu quả trong việc quản lý các động lực phức tạp và điều kiện thay đổi của các quy trình lò phản ứng sinh học thịt nuôi cấy, đặc biệt khi cần kiểm soát chính xác. Mặt khác, điều khiển tỷ lệ-tích phân-đạo hàm (PID) thường là lựa chọn tốt hơn vì sự đơn giản và dễ dàng điều chỉnh. PID đặc biệt phù hợp khi không có hoặc không cần mô hình động. Nó hoạt động tốt trong các hệ thống đơn giản đòi hỏi phản ứng nhanh, thời gian thực, nơi mà các tính năng tiên tiến của MPC có thể không mang lại nhiều lợi ích bổ sung.









