

如果在不匹配方法、介质、温度和探针响应的情况下比较kLa值,可能会做出错误的放大决策。
对于生物工艺工程师、细胞培养科学家和培养肉类研发团队&, 简短的答案很简单:静态排气法最适合容器基准测试,而动态和排气氧平衡方法在需要活性培养基条件下的过程数据时更有用. 基于水的kLa数值可能会误导,探针滞后可能会扭曲快速传输速率,介质添加剂如Pluronic F-68在某些设置中可能会将kLa降低 50%或更多。
以下是一篇文章的概述:
- kLa不是一个独立的目标. 我会将其与P/V、剪切限制、气体流量和混合时间一起使用.
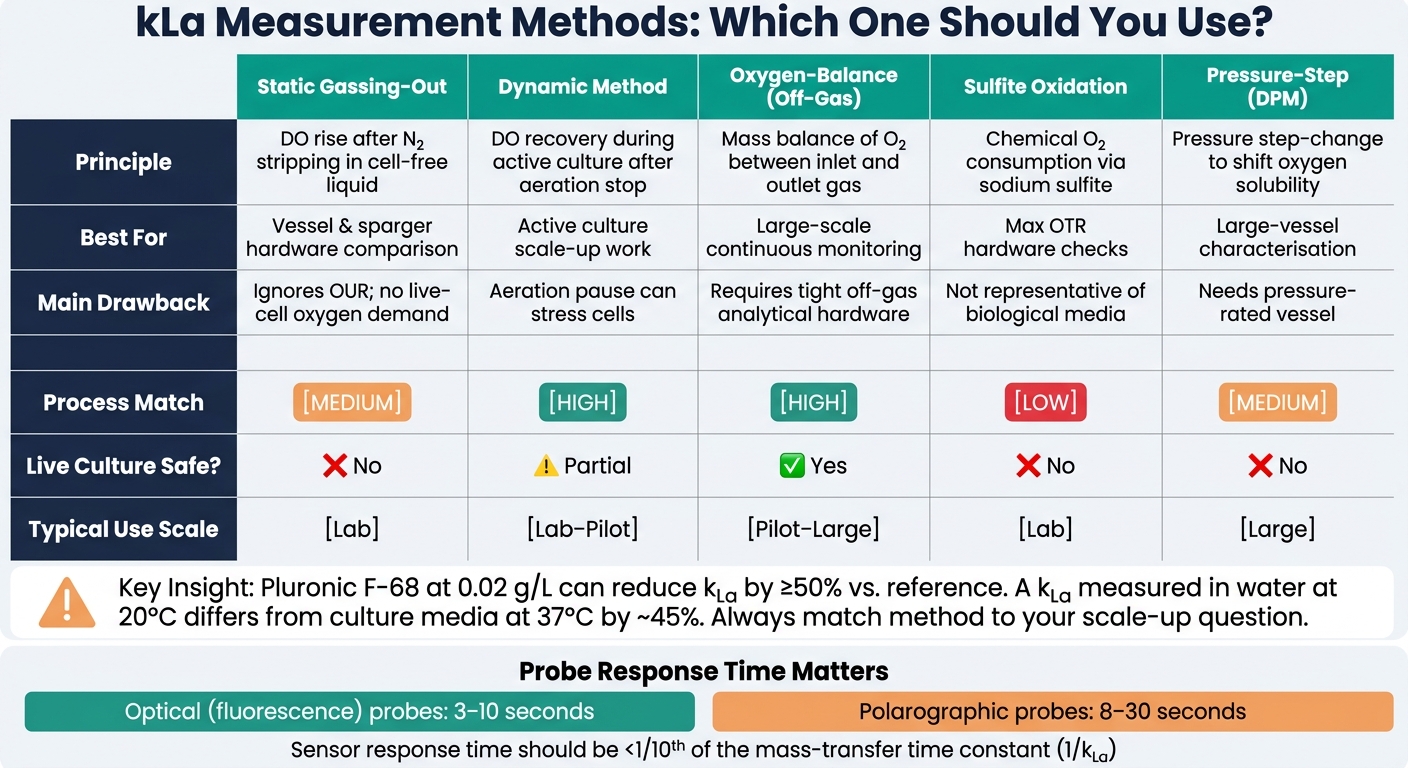
- 静态脱气提供了一个清晰的硬件比较,但它忽略了我们的 ,并且不反映活跃的培养环境。
- 动态方法在培养过程中跟踪氧气传递,更接近于大规模运行,尽管通气暂停可能会给细胞带来压力。
- 氧平衡方法使用进出口气体数据,适合较大的容器,但需要精确的气体分析。
- 亚硫酸盐氧化和压力阶梯法 主要用于设备特性化,而不是用于活体培养肉汤。
- 探针响应时间很重要: 光学溶解氧探针通常响应时间为3-10秒, 而极谱探针通常为 8-30秒.
- 温度和介质很重要: 在20°C水中测得的kLa不能直接映射到37°C的培养介质。.
- 文章中报告的典型范围是50-200 h⁻¹在2-10 L和 80-300 h⁻¹在 50-500 L, 但前提是完整的测试基础相匹配。
H.E.L 解释 | 实现一致的氧气传递:kLa 对发酵放大的影响
sbb-itb-ffee270
快速比较
生物反应器放大的 kLa 测量方法:并排比较
| 方法 | 最佳用途 | 主要缺点 | 过程匹配 |
|---|---|---|---|
| 静态排气法 | 容器和喷射器比较 | 无活细胞氧气需求 | 低到中等 |
| 动态方法 | 活性培养放大工作 | 停止通气可能扰乱细胞 | 高 |
| 氧平衡 | 大规模监测 | 需要精确的废气数据 | 高 |
| 亚硫酸盐氧化 | 最大传输硬件检查 | 不像工艺介质 | 低 |
| 压力阶梯 | 大型容器特性化 | 需要压力额定设置 | 中等 |
如果我在制定放大计划,特别是在过渡到试验规模系统, 时,我会将方法选择视为数据质量检查的一部分, 而不是事后考虑。
2. 生物反应器研究中使用的主要 kLa 测量方法
文献通常将 kLa 测量分为三大方法类别:静态排气法, 动态和氧平衡法, 以及化学或压力法. 每种方法从略有不同的角度观察氧气传递。这很重要,因为方法本身可以影响放大数据的解读方式。
2.1 静态排气法
静态排气法首先通过氮气去氧化液体。然后重新开启曝气,并跟踪溶解氧(DO)随时间的恢复情况。kLa 是根据 DO 上升的速率计算得出的。
由于不需要活细胞或危险试剂,这种方法是对生物反应器进行基准测试的简单方法。问题在于它不反映细胞呼吸或培养过程中培养液性质的变化。结果还取决于介质、叶轮设计、气体分布器设计、气体流量、温度和消泡剂的使用。例如,在一个400 L的搅拌罐中,添加0.02 g/L的Pluronic F-68可以将kLa降低至少50%,与没有添加剂的参考相比[2].
一个实际问题是探头动态。如果传感器响应过慢,测得的kLa会偏斜,需要校正[1].
2.2 动态和氧平衡方法在工艺条件下
如果目标是工艺相关性而不是清水基准,动态方法通常能提供更多信息。在最常见的版本中,通气会短暂停止,以便细胞呼吸将溶解氧拉低。然后恢复通气,并分析恢复瞬态。这使得测量更接近实际运行时的培养基状态。
氧平衡方法则采取不同的途径。而不是中断曝气,它通过OTR减去OUR来估算kLa,通常使用诸如质谱分析的废气分析[2]. 这是一种非侵入性的方法,特别适用于较大的容器。但这有一个代价:你需要生物过程控制软件和废气分析硬件以及可靠的OUR数据。
对于培养肉的工作,这些方法很有用,因为它们反映了在放大过程中相同的培养基和细胞条件下的氧气传递。权衡相当明显。在动态方法中,DO在曝气暂停期间下降,如果中断时间过长,可能会对培养物造成压力。
化学和压力阶跃方法更多用于设备特性化而不是实时过程读数。
2.3 亚硫酸盐氧化和压力阶跃方法
对于非生物基准测试,另外两种方法经常出现。它们适用于表征硬件,但不能直接代表活体培养肉肉汤。
亚硫酸盐氧化使用亚硫酸钠,在催化剂存在下氧化,以消耗溶解氧的速率计算kLa。问题很简单:液体不代表生物介质,因此结果不能直接转化为培养肉肉汤[2].
压力阶跃法通过逐步改变容器压力来根据亨利定律改变氧饱和浓度(C*)。这在不改变搅拌速度或气体流量的情况下创造了质量传递驱动力[2]. 当压力比搅拌或通气更容易控制时,这种方法很方便。不过,它需要耐压容器和严格控制的压力变化,这限制了日常使用。即便如此,它仍然是设备表征的有用研究方法。
3. 方法的优势、局限性和可比性
已发表的 kLa 值只有在测试设置和基本假设相同的情况下才具有可比性。即使是温度也会对结果产生显著影响。如果一篇论文对溶解氧探头响应时间进行了校正,而另一篇没有,那么即使其余设置看起来相同,这些值也不应被视为等同。
当您决定这个数字的用途时,这个差距最为重要。. 它是硬件基准吗?还是反映培养过程中实际情况的过程指标?
3.1 静态排气仍然是参考方法
静态排气仍然是硬件比较的首选方法。如果目的是在受控条件下比较曝气器设计、搅拌器几何形状或 容器配置,它能很好地完成任务。它是简单的、可重复的,并且不需要活细胞。
缺点同样明显:kLa在水中测量是对培养肉类介质中氧气传递的一个糟糕预测。去离子水中的数值可以告诉你一些关于容器本身的信息,但在实际介质使用时对性能的了解就少得多。
这就是动态方法开始更重要的地方。一旦工作从容器特性转向活体培养,过程相关性就开始超过清洁系统控制。
3.2 动态和溶解氧剖面方法如何增加过程相关性
动态方法更接近实际过程条件,因为它们在活跃培养期间测量氧气传递。这意味着它们捕捉到氧气需求和培养液的实际特性。对于放大工作, 来说,这使得结果比清水估计更有用。
氧平衡方法在操作条件下增加了一个连续的、非侵入性的读数,尽管它依赖于准确的废气分析和稳定的操作[2].
当这些方法并排放置时,差异更容易看出。
3.3 比较表:适合培养肉规模化的方法
| 方法 | 原理 | 所需数据 | 主要假设 | 优点 | 局限性 | 最佳用途 |
|---|---|---|---|---|---|---|
| 静态排气法 | 在无细胞液体中N₂剥离后DO上升 | DO时间过程,探头响应时间 | 液体混合良好;无OUR | 简单;可重复;无需细胞 | 忽略OUR;对培养基成分和探头滞后敏感 | 初始容器特性;硬件比较 |
| 动态方法 | 在短暂通气停止后活性培养中的DO恢复 | DO时间过程,OUR估计 | 准稳态培养;应用传感器校正 | 反映实际的培养基和细胞条件 | 通气暂停可能会给培养物带来压力;对传感器滞后敏感 | 在活跃生长期间进行工艺优化和放大 |
| 氧平衡(气相分析) | 进出口气体中氧气的质量平衡 | 准确的气体流量和氧气浓度 | 稳定操作 | 非侵入性;连续;无培养扰动 | 需要高度准确的废气分析 | 大规模生产监测 |
| 亚硫酸盐氧化 | 亚硫酸钠的化学氧化消耗氧气 | 亚硫酸盐消耗率 | 反应速率受传质限制 | 适用于最大OTR容量 | 不代表生物介质;可能高估kLa | 仅用于设备基准测试;不用于活体培养工作 |
| 动态压力法 (DPM) | 压力阶跃变化以改变氧溶解度 | 压力和溶解氧时间过程 | 压力比气体成分平衡得更快 | 避免气相滞后;适用于大型容器 | 需要耐压容器和精确的压力控制 | 大规模特征化 |
这些方法选择会影响如何将kLa数据转化为放大目标和设备选择。
4. 使用 kLa 数据进行放大和设备选择
4.1 从实验室到中试规模的放大目标设定
一旦测量了 kLa,接下来的工作就是将该数值转化为搅拌、气流和混合的操作限制。kLa 应被视为一个约束 , 而不是整个决策。它需要足够高以满足氧气需求,但不能高到使过程进入细胞无法承受的剪切状态。
这种平衡在培养肉中很重要。在更大规模上保持 kLa 不变可能会导致更高的叶轮尖端速度,从而导致更高的剪切[4]. 在哺乳动物细胞培养中,叶轮尖端速度通常为0.1-0.5 m/s,以平衡氧气传递与剪切应力[5]. 因此,实际上,kLa 位于一个更广泛的操作窗口内,该窗口还包括 单位体积功率输入 (P/V), 表面气速 和 混合时间 [4][5] .
这里有一个有用的基准。在 2-10 L 实验室规模的搅拌罐反应器中,kLa 通常在 50-200 h⁻¹ 范围内。在 50-500 L 中试规模的容器中,典型范围是 80-300 h⁻¹ [4]. 关键步骤是找到所有容器都能达到的重叠。这就是将放大目标从纸上的好主意变成可以运行的东西的关键。
4.2 选择传感器和硬件以实现可靠的 kLa 工作
良好的放大数据始于不会偏离结果的仪器和气体硬件。
传感器响应时间对 kLa 的准确性有直接影响。在高kLa系统中,使用快速响应的DO探头. 慢速极谱探头需要校正,并且可能低估kLa。极谱探头的响应时间通常为8-30秒, ,而光学荧光探头的响应时间为3-10秒 [4]. 一个好的原则是传感器的响应时间应为小于传质时间常数(1/kLa)的十分之一 [1] . 如果无法满足该条件,光学探头通常是更安全的选择。
气体输送同样重要。热质量流量控制器有助于保持气体流量稳定,从而使测量更具可重复性。选择喷射器也直接影响您可以达到的kLa [2][3]. 较小的气泡提供更多的气液界面面积,但有一个问题:培养基添加剂可能会大幅降低kLa [2] .
5. 解释kLa测量值的关键要点
综上所述,您选择的方法应与您试图回答的放大问题相匹配。在实践中,这意味着要明确您需要硬件特性化还是面向工艺的放大数据.
在20°C的水中测得的kLa值不能直接应用于37°C的培养基中。仅温度校正就会产生大约45%的差异 [4]. 而且kLa不是仅靠理论就能预测的。每个生物反应器都需要其自身测量的kLa [1] .
当您从实验室规模转向中试规模. 时,这一点更为重要。 在与盐匹配的缓冲液(如PBS)中进行静态脱气,可以为您提供一个干净的设备基准。但随着规模的扩大,在实际培养基中进行动态测量可以更好地了解过程在实践中会如何表现,因为培养基添加剂可以大幅度改变kLa [4]. 如果您依赖于基于水的数值,可能会导致在规模上过度指定氧气传输能力。
最后的检查是kLa是否在完整的操作窗口内。将kLa视为一个过程约束,而不是单独的目标。在选择 P/V和 剪切限制时,将其与最佳生物反应器系统和搅拌策略一起使用[4].
常见问题解答
我应该使用哪种kLa方法进行放大?
动态排气法是确定搅拌罐生物反应器中kLa的最广泛使用的方法,也是大多数团队在实践中推荐的方法。它相对快速,并且避免了使用危险化学品或活体生物。
对于培养肉的放大,最好在无细胞的情况下进行测量,以免细胞代谢影响结果。使用37°C的PBS缓冲液以更好地匹配工艺介质。如果溶解氧探头响应时间较慢,请进行校正。如果不这样做,可能会低估 kLa.
为什么基于水的kLa值常常具有误导性?
基于水的kLa值可能具有误导性,因为它们不能反映实际细胞培养基的 物理化学行为。真实的培养基不仅仅是混合了营养物质的水。盐浓度、粘度、表面张力和消泡剂都会以水测试无法显示的方式改变氧气传质。
这种差距很重要。如果忽视培养基的影响,您的氧气输送估算可能会与生物反应器的实际操作相差甚远。一个很好的例子是消泡剂:它可以增加气泡聚结,减少界面面积,并降低kLa多达50%。在培养肉生产中,这不是一个小细节。它可以改变一个过程是否有足够的氧气传输余量或接近其极限运行。
探头滞后和培养基添加剂如何影响kLa?
探头滞后可能会扭曲kLa测量。如果溶解氧传感器相对于氧气传输速率响应过慢,结果可能会偏差,并可能需要 非线性校正.
培养基添加剂也可能以重要的方式改变氧气传输。电解质和盐类可以抑制气泡合并。Pluronic F68可能会减少气泡尺寸。消泡剂通常会增加气泡合并,从而减少有效界面面积并降低kLa.









