

模型预测控制(MPC)正在改变生物反应器的管理方式,特别是在培养肉生产中。与在变化发生后做出反应的PID系统不同,MPC预测未来行为,从而实现实时精确调整。这种主动的方法减少了变异性,提高了产品产量,并确保即使在大规模生产中也能保持一致性。
关键要点:
- MPC与PID: MPC将葡萄糖跟踪误差减少了5.1%,并将蛋白质产量提高了3.9%,与PID系统相比。
- PID的挑战: PID在处理非线性生物过程、延迟和变化条件时存在困难,常常导致振荡或效率低下。
- MPC的优势: 通过集成拉曼光谱等先进监测工具,处理干扰、优化产量并支持可扩展性。
- 实施障碍: MPC需要精确的模型和更高的计算资源,但自适应调谐和输入阻塞等技术有助于解决这些挑战。
对于培养肉生产商来说,MPC提供了一种管理复杂生物过程的强大方法,确保更好地控制营养水平和副产物的形成。虽然PID仍然是简单任务的一个选择,但MPC越来越成为可扩展、高性能系统的首选。
1. 模型预测控制 (MPC)
干扰下的性能
MPC使用数学模型来预测未来行为,使其能够实时调整控制变量。这使其在处理波动的入口进料、传感器噪声和测量延迟的生物反应器中特别有效。
在2021年,来自伊利诺伊理工学院和安进公司 的研究人员测试了MPC处理干扰的能力。他们发现,与传统的比例积分(PI)控制相比,MPC在管理葡萄糖和谷氨酰胺浓度变化时,葡萄糖跟踪能力提高了5.1% [2]. 早在2014年,Brian Glennon的团队将非线性模型预测控制(NMPC)应用于一个15升的试验生物反应器,使用CHO 320哺乳动物细胞。通过整合Kaiser RXN2拉曼光谱技术每六分钟监测一次葡萄糖,NMPC在显著的过程变异性和传感器噪声下维持了稳定的11 mM葡萄糖设定点 [3].
更新的MPC策略继续突破界限。2026年3月,Lipe Carmel和Giacomo Sartori为谷氨酸棒状杆菌发酵引入了一种多流入控制(MIC)策略。他们的方法通过同时调整营养输入和稀释率,在单次运行中跟踪7.0、13.0和15.7 g/L的生物质设定点时,将超调减少了78.0% [6].
这些积极的调整不仅稳定了关键变量,还为更好的整体产量铺平了道路。
产量优化
MPC将重点从简单地维持中间设定点转向最大化最终批次结果。这对于培养肉生产至关重要,因为在大规模生产中实现一致的高质量结果是一个重大挑战。
例如,Mudassir M. Rashid的团队展示了一种关键质量属性预测控制算法,与传统方法相比,在运行结束时将产品浓度提高了3.9%[2]. 同样,将机器学习模型整合到MPC系统中,与历史平均水平相比,最终蛋白质产量提高了超过2%[1].
虽然结果令人鼓舞,但实施MPC也面临一系列挑战。
实施的简易性
尽管有其优势,在培养肉生产中部署MPC需要克服重大障碍。系统的有效性依赖于准确的数学模型,这些模型能够捕捉生物反应器动态的复杂性。正如Touraj Eslami和Alois Jungbauer所解释的:
"任何反馈设计的有效性在根本上受到系统动态和模型准确性的限制" [8].
非线性模型虽然强大,但需要高计算资源,并可能导致实时优化的延迟 [8]. 此外,非线性MPC的非凸优化可能导致局部极小值,如果初始化不当,会影响性能[3]. Konstantins Dubencovs及其同事强调了其实际应用价值:
“MPC几乎是唯一可以在使用标准PC设备的情况下,将数学模型应用于生物技术过程控制的方法”[4].
自适应MPC策略通过自动调整控制器参数来解决生物变异性问题[4] [5]. 集成过程分析技术(PAT),如用于频繁监测的拉曼光谱,减少了对专用计算基础设施的需求[8] [3]. 像“输入阻塞”这样的技术,将时间范围分成块,也有助于管理计算负载 [8].
培养肉生产的可扩展性
MPC 管理干扰和优化产量的能力使其成为扩大培养肉生产规模的有力候选者。它已经在生物制药和微生物工艺中证明了自己,在这些领域中它满足了严格的工艺约束 [1]. 对于大规模操作,MPC 通过调整底物供给来解决质量和热量传递等挑战,以确保适当的混合、氧气水平和冷却 [5].
好处显而易见:基于反馈的营养控制使单克隆抗体效价提高了 1.7 倍,而预测策略在 30 天内防止了 4.5–10% 的产品损失 [3] [7]. 布莱恩·格伦农恰当地总结了当前的状况:
“与化学和传统制药行业相比,生物工艺的控制还处于起步阶段……部分原因在于生物反应器控制的挑战:对过程的理解不足[和]缺乏对相关过程参数的测量”[3].
即便面临这些挑战,将机器学习整合到MPC预测模型中提供了一条前进的道路。这些进步有助于弥补高保真第一性原理模型的缺失,使MPC越来越适合培养肉生产的复杂需求[1]. 对于这一领域的公司,像
2.PID控制和其他传统方法
干扰下的性能
虽然模型预测控制(MPC)在预测变化方面表现出色,但传统的PID(比例-积分-微分)控制器存在显著缺陷。PID控制器在生物技术中被广泛使用,其操作是反应性的,这意味着它们仅在偏差发生后才做出响应。这种反应性方法在处理生物过程的非线性和时间依赖性方面存在困难,使得PID在此类环境中效果较差[5][9].
一个关键问题是,当过程动态在培养周期中显著变化时,具有固定调节参数的PID系统往往无法保持稳定性[5]. 例如,在哺乳动物细胞培养中,测量延迟——有时长达24小时——进一步降低了PID的有效性[3]. 这些延迟阻碍了及时调整,导致在高度非线性环境中出现振荡或静态误差[3].
PID和MPC之间的性能差距有数据支持。在Mudassir M. Rashid、Satish J. Parulekar和Ali Cinar于2021年的一项研究中,PID系统在未知干扰和测量噪声条件下,葡萄糖浓度设定点的跟踪误差比MPC高出5.1%[2]. 此外,PID信号常常受到来自曝气、泡沫和混合过程的生物反应器噪声的干扰[5].
产量优化
PID的核心挑战之一是其无法预测代谢变化或适应关键底物浓度变化。这一限制常常导致诸如“溢流代谢”之类的问题,其中过量的底物会产生抑制性副产物,如乙酸在E.coli或乳酸和氨在哺乳动物细胞中 [5].
在哺乳动物细胞培养中——培养肉生产的关键——传统的喂养方法无法维持所需的低营养浓度以避免这些副产物。例如,分别将葡萄糖和谷氨酰胺水平控制在0.3 mM和0.5 mM,可以显著减少抑制性副产物,将氨减少74%,乳酸减少63%[3]. 然而,实现这种精确度超出了标准PID系统的能力。
Brian Glennon总结了这一挑战:
"生物过程的控制还处于起步阶段...由于与生物反应器控制相关的挑战:对过程的理解不足、缺乏对相关过程参数的测量以及控制动态、复杂和非线性生物过程所固有的困难 [3].
实施的简易性
尽管存在局限性,PID 仍然因其简单性而广受欢迎。它需要的计算能力很少,并且可以用标准设备实现 [5]. 大多数设置依赖于间接反馈机制,如 pH-stat(调整因营养物消耗引起的 pH 变化)或 DO-stat(在底物耗尽时响应溶解氧峰值)。然而,由于缺乏可靠的在线传感器来直接测量生物质或底物浓度,PID 系统的扩展受到限制 [5].
在许多中小型设施中,手动调整喂养配置文件 - 通常每24小时进行一次 - 仍然很常见。这种方法与FDA的过程分析技术(PAT)倡议背道而驰,该倡议提倡实时自动控制[4]. 这些手动干预进一步突显了以可扩展、高效的方式实施PID的挑战。
培养肉生产的可扩展性
随着生产规模的扩大,PID的局限性变得更加明显。大规模生物工艺需要精确的基质喂养调整,以管理质量传递、混合、传热和氧合等因素[5]. 固定的调谐参数无法处理发酵过程中发生的显著工艺波动[5]. Behzad Moshiri 指出:
“传统控制方法在此类任务中(控制生物过程)不成功……它们通常对高度不稳定的非线性生物反应器来说是不够的”[9].
例如,在涉及青霉素生产的研究中,生物过程的高度非线性和不稳定性导致传统的PID系统无法维持高效的设定点跟踪[9].
在培养肉生产中,一致性和产量优化至关重要,这些限制带来了重大挑战。虽然PID可以处理较简单的任务,如pH值或溶解氧控制,但其反应性和无法管理复杂的大规模营养动态的能力使其不适合培养肉生产系统的高级要求。
模型预测控制
sbb-itb-ffee270
优点和缺点
生物反应器性能比较中的MPC与PID控制系统
在早期性能比较的基础上,本节探讨了使用模型预测控制(MPC)与比例-积分-微分(PID)控制优化生物反应器的优缺点。
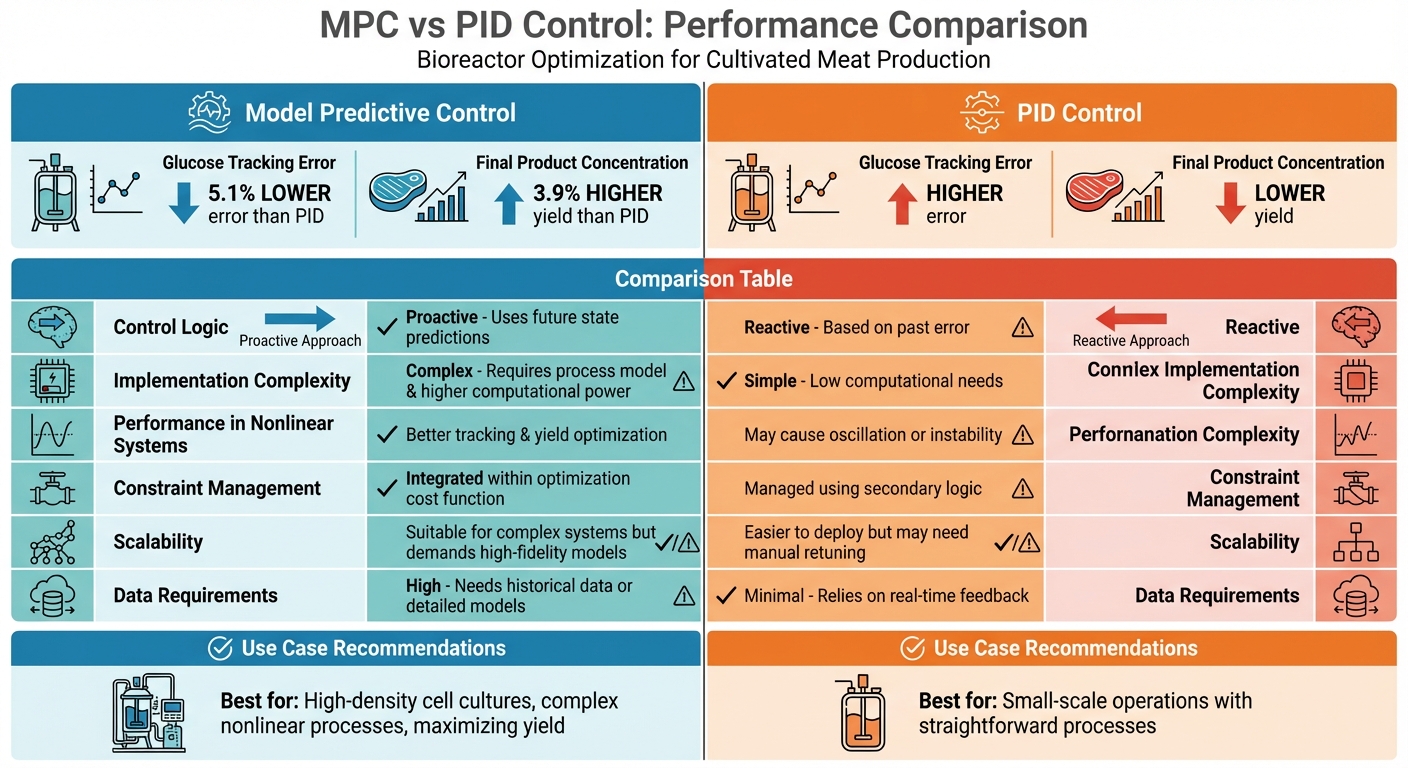
在哺乳动物细胞补料分批生物反应器中,MPC优于传统的PI算法,通过减少5.1%的葡萄糖浓度设定点跟踪误差并增加3.9%的最终产品浓度[2] . 这种预测能力在培养肉系统中特别重要,因为维持精确的营养水平可以防止抑制性副产物的形成。
这两种策略的根本区别在于它们的控制方法。PID 控制是被动的, ,仅在偏差发生后进行调整。而 MPC 则是主动的, ,使用过程模型预测未来行为并相应调整输入。然而,这种性能提升伴随着一些权衡。
MPC 需要详细的过程建模和更大的计算资源, ,而 PID 控制器更易于实施。PID 系统可以在标准可编程逻辑控制器(PLC)上运行,几乎不需要建模,而 MPC 需要与生物过程控制器集成的 PC[3][4]. Konstantins Dubencovs 来自拉脱维亚国家木材化学研究所指出:
“MPC 实际上是唯一可以在使用标准 PC 设备的情况下,通过数学模型控制生物技术过程的方法。"[4]
以下是两种方法的并排比较:
| 特性 | 传统PID控制 | 模型预测控制 (MPC) |
|---|---|---|
| 控制逻辑 | 反应式;基于过去的误差 | 前瞻性;使用未来状态预测 |
| 实施复杂性 | 简单;计算需求低 | 复杂;需要过程模型和更高的计算能力 |
| 非线性系统中的性能 | 可能导致振荡或不稳定 | 提供更好的跟踪和产量优化 |
| 约束管理 | 使用次级逻辑管理 | 集成在优化成本函数内 |
| 可扩展性 | 更容易部署,但可能需要手动重新调整 | 适用于复杂系统,但需要高保真模型 |
| 数据需求 | 最小化;依赖于实时反馈 | 高;需要历史数据或详细模型 |
这些比较强调了简单性和性能之间的权衡。选择PID和MPC主要取决于操作规模和可用的技术资源。
结论
模型预测控制(MPC)在优化生物反应器性能方面比传统PID系统具有明显优势,特别是在培养肉生产中。在这个领域,精确的环境控制直接影响产品质量和产量,MPC提供了可衡量的好处。例如,与传统方法相比,它提高了葡萄糖跟踪精度5.1%,并将最终产品浓度提高了3.9%[2]. 这种预测能力在高密度细胞培养中尤为关键,因为维持营养平衡可以防止有害副产物的积累。
当最大化产量或管理复杂的非线性过程时,MPC是首选解决方案。它在处理高变异性、测量噪声或延长采样间隔方面表现出色,提供了PID系统无法匹敌的稳健性。然而,对于具有简单流程的小规模操作,PID控制可能仍然是更具成本效益的选择。MPC的前瞻性方法与PID控制的反应性特质之间的对比,突显了其在高性能培养肉生产中的战略价值。
计算能力的进步和诸如过程分析技术(e.g. 、拉曼光谱和近红外传感器)等工具使得MPC的实施更加容易。这些技术通过标准硬件设置实现实时优化,降低了采用的门槛[5].
对于培养肉生产商来说,采购专业的生物反应器传感器、分析仪器和控制设备对于成功整合MPC至关重要。平台如
MPC 代表了生物反应器控制的一个关键转变,从反应系统转向预测的“质量设计”方法。随着培养肉生产从实验室扩展到商业运营,MPC 将在保持产品质量一致性和提高运营效率方面发挥重要作用。这一演变标志着生物制造的一个重要进步 [3].
常见问题
在生物反应器中运行 MPC 需要哪些数据和传感器?
在生物反应器中运行模型预测控制 (MPC) 涉及使用传感器来跟踪关键过程变量。这些包括底物浓度(如葡萄糖)、溶解氧水平、pH 值、温度和生物量测量等因素。为了保持准确和有效的控制,实时数据采集系统对于持续监测这些变量是必不可少的。
如何为非线性细胞培养构建和验证MPC模型?
开发和验证非线性细胞培养的MPC模型始于创建一个精确的过程模型。这可以通过使用第一性原理方程或利用机器学习技术来完成。. 下一步是通过将模型预测与生物反应器的实验数据进行比较来验证该模型。通过调整模型参数来解决任何差异以提高准确性。
一旦模型集成到MPC框架中,控制器将在生物反应器中进行测试。通过迭代调整,系统被微调以建立优化性能的供料策略,同时保持在所需的过程约束内。
在培育肉生产中,什么时候PID仍然是比MPC更好的选择?
模型预测控制(MPC)在管理培育肉生物反应器过程的复杂动态和变化条件方面非常有效,尤其是在精确控制至关重要的情况下。另一方面,比例-积分-微分(PID)控制因其简单性和易于调节性通常是更好的选择。PID特别适用于没有或不需要动态模型的情况。它在需要快速实时响应的简单系统中表现良好,而MPC的高级功能可能不会带来太多额外的好处。










