

Model Predictive Control (MPC) sedang mengubah cara bioreaktor diuruskan, terutamanya dalam pengeluaran daging yang diternak. Tidak seperti sistem PID, yang bertindak balas terhadap perubahan selepas ia berlaku, MPC meramalkan tingkah laku masa depan, membolehkan pelarasan tepat dalam masa nyata. Pendekatan proaktif ini mengurangkan kebolehubahan, meningkatkan hasil produk, dan memastikan konsistensi walaupun pada skala besar.
Pengajaran utama:
- MPC vs PID: MPC mengurangkan kesilapan penjejakan glukosa sebanyak 5.1% dan meningkatkan hasil protein sebanyak 3.9% berbanding sistem PID.
- Cabaran dengan PID: PID menghadapi kesukaran dengan proses biologi tak linear, kelewatan, dan keadaan yang berubah, sering mengakibatkan ayunan atau ketidakcekapan.
- Manfaat MPC: Menangani gangguan, mengoptimumkan hasil, dan menyokong kebolehkalaan dengan mengintegrasikan alat pemantauan canggih seperti spektroskopi Raman.
- Halangan Pelaksanaan: MPC memerlukan model yang tepat dan sumber pengiraan yang lebih tinggi, tetapi teknik seperti penalaan adaptif dan penyekatan input membantu menangani cabaran ini.
Bagi pengeluar daging yang diternak, MPC menawarkan cara yang kukuh untuk menguruskan bioproses yang kompleks, memastikan kawalan yang lebih baik ke atas tahap nutrien dan pembentukan produk sampingan. Walaupun PID kekal sebagai pilihan untuk tugas yang lebih mudah, MPC semakin menjadi pilihan utama untuk sistem yang boleh diskalakan dan berprestasi tinggi.
1. Kawalan Prediktif Model (MPC)
Prestasi Di Bawah Gangguan
MPC menggunakan model matematik untuk meramalkan tingkah laku masa depan, membolehkannya menyesuaikan pembolehubah kawalan secara masa nyata. Ini menjadikannya sangat berkesan dalam bioreaktor yang berurusan dengan suapan masuk yang berubah-ubah, bunyi sensor, dan kelewatan dalam pengukuran.
Pada tahun 2021, penyelidik dari Illinois Institute of Technology dan Amgen menguji keupayaan MPC untuk menangani gangguan. Mereka mendapati ia meningkatkan penjejakan glukosa sebanyak 5.1% berbanding kawalan berkadar-integral (PI) tradisional apabila menguruskan variasi dalam kepekatan glukosa dan glutamin [2]. Sebelum ini, pada tahun 2014, pasukan Brian Glennon menggunakan Kawalan Prediktif Model Tak Linear (NMPC) pada bioreaktor perintis 15 liter menggunakan CHO 320 sel mamalia. Dengan mengintegrasikan spektroskopi Raman Kaiser RXN2 untuk pemantauan glukosa setiap enam minit, NMPC mengekalkan titik set glukosa 11 mM yang stabil walaupun terdapat kebolehubahan proses yang ketara dan bunyi sensor [3].
Strategi MPC yang lebih baru terus mendorong batasan. Pada bulan Mac 2026, Lipe Carmel dan Giacomo Sartori memperkenalkan strategi Kawalan Pelbagai Aliran Masuk (MIC) untuk fermentasi Corynebacterium glutamicum.Pendekatan mereka, yang secara serentak menyesuaikan input nutrien dan kadar pencairan, mengurangkan lebihan sebanyak 78.0% apabila menjejaki titik set biomas sebanyak 7.0, 13.0, dan 15.7 g/L dalam satu larian [6].
Pelarasan proaktif ini bukan sahaja menstabilkan pembolehubah utama tetapi juga membuka jalan untuk hasil keseluruhan yang lebih baik.
Pengoptimuman Hasil
MPC mengalihkan fokus daripada sekadar mengekalkan titik set pertengahan kepada memaksimumkan hasil akhir kumpulan. Ini adalah penting untuk pengeluaran daging yang ditanam, di mana mencapai hasil yang konsisten dan berkualiti tinggi pada skala besar adalah cabaran utama.
Contohnya, pasukan Mudassir M. Rashid menunjukkan bahawa algoritma kawalan ramalan atribut kualiti kritikal meningkatkan kepekatan produk sebanyak 3.9% pada akhir larian berbanding dengan kaedah konvensional [2]. Begitu juga, menggabungkan model pembelajaran mesin ke dalam sistem MPC telah membawa kepada peningkatan lebih dari 2% dalam pengeluaran protein akhir berbanding purata sejarah [1].
Walaupun hasilnya menjanjikan, pelaksanaan MPC datang dengan set cabarannya sendiri.
Kemudahan Pelaksanaan
Walaupun dengan kelebihannya, melaksanakan MPC dalam pengeluaran daging yang diternak memerlukan mengatasi halangan yang ketara. Keberkesanan sistem bergantung kepada model matematik yang tepat yang menangkap kerumitan dinamik bioreaktor. Seperti yang dijelaskan oleh Touraj Eslami dan Alois Jungbauer:
"Keberkesanan mana-mana reka bentuk maklum balas secara asasnya dibatasi oleh dinamik sistem dan ketepatan model" [8].
Model bukan linear, walaupun berkuasa, memerlukan sumber pengiraan yang tinggi dan boleh menyebabkan kelewatan dalam pengoptimuman masa nyata [8]. Tambahan pula, pengoptimuman bukan konveks MPC Bukan Linear boleh membawa kepada minima tempatan, menjejaskan prestasi jika tidak dimulakan dengan betul [3]. Konstantins Dubencovs dan rakan-rakan menekankan kegunaan praktikalnya:
"MPC adalah satu-satunya kaedah yang boleh menyediakan penggunaan model matematik dalam kawalan proses bioteknologi menggunakan peralatan PC standard" [4].
Strategi MPC adaptif menawarkan penyelesaian dengan melaraskan parameter pengawal secara automatik untuk menangani variabiliti biologi [4] [5]. Mengintegrasikan Teknologi Analisis Proses (PAT), seperti spektroskopi Raman untuk pemantauan kerap, mengurangkan keperluan untuk infrastruktur pengkomputeran khusus [8] [3]. Teknik seperti 'input blocking', yang mengelompokkan jangka masa ke dalam blok, juga membantu menguruskan beban pengiraan [8].
Kebolehkembangan untuk Pengeluaran Daging Ternakan
Keupayaan MPC untuk menguruskan gangguan dan mengoptimumkan hasil menjadikannya calon yang kuat untuk meningkatkan pengeluaran daging ternakan. Ia telah membuktikan dirinya dalam proses biofarmaseutikal dan mikrob, di mana ia memenuhi kekangan proses yang ketat [1]. Untuk operasi berskala besar, MPC menangani cabaran seperti pemindahan jisim dan haba dengan menyesuaikan suapan substrat untuk memastikan pencampuran yang betul, tahap oksigen, dan penyejukan [5].
Manfaatnya jelas: kawalan nutrien berasaskan maklum balas telah meningkatkan titer antibodi monoklonal sebanyak 1.7 kali ganda, manakala strategi ramalan telah menghalang kerugian produk sebanyak 4.5–10% dalam tempoh 30 hari [3] [7]. Brian Glennon dengan tepat merumuskan keadaan semasa:
"Kawalan bioproses masih di peringkat awal berbanding dengan sektor kimia dan farmaseutikal tradisional... sebahagiannya disebabkan oleh cabaran yang berkaitan dengan kawalan bioreaktor: pemahaman proses yang lemah [dan] kekurangan pengukuran parameter proses yang relevan" [3].
Walaupun dengan cabaran ini, mengintegrasikan pembelajaran mesin ke dalam model ramalan MPC menawarkan jalan ke hadapan. Kemajuan ini membantu mengimbangi ketiadaan model prinsip pertama yang berketepatan tinggi, menjadikan MPC semakin sesuai untuk memenuhi permintaan kompleks dalam pengeluaran daging yang diternak [1]. Bagi syarikat dalam bidang ini, platform seperti
2.PID Control dan Kaedah Tradisional Lain
Prestasi Di Bawah Gangguan
Walaupun Model Predictive Control (MPC) cemerlang dalam menjangka perubahan, pengawal PID (proportional-integral-derivative) tradisional mempunyai kelemahan yang ketara. Pengawal PID, yang digunakan secara meluas dalam bioteknologi, beroperasi secara reaktif, bermakna mereka hanya bertindak balas selepas penyimpangan berlaku. Pendekatan reaktif ini bergelut dengan sifat tidak linear dan bergantung kepada masa dalam proses biologi, menjadikan PID kurang berkesan dalam tetapan sedemikian [5][9].
Isu utama adalah bahawa sistem PID dengan parameter penalaan tetap sering gagal mengekalkan kestabilan apabila dinamik proses berubah dengan ketara semasa kitaran penanaman [5]. Contohnya, dalam kultur sel mamalia, kelewatan pengukuran - kadang-kadang selama 24 jam - mengurangkan lagi keberkesanan PID [3]. Kelewatan ini menghalang penyesuaian tepat pada masanya, menyebabkan osilasi atau ralat statik dalam persekitaran yang sangat tidak linear [3].
Jurang prestasi antara PID dan MPC disokong oleh data. Dalam kajian 2021 oleh Mudassir M. Rashid, Satish J. Parulekar, dan Ali Cinar, sistem PID menunjukkan ralat penjejakan 5.1% lebih tinggi untuk set-point kepekatan glukosa berbanding MPC di bawah keadaan gangguan yang tidak diketahui dan bunyi pengukuran [2]. Tambahan pula, isyarat PID sering diputarbelitkan oleh bunyi bioreaktor daripada proses pengudaraan, buih, dan pencampuran [5].
Pengoptimuman Hasil
Salah satu cabaran utama PID adalah ketidakmampuannya untuk meramalkan peralihan metabolik atau menyesuaikan diri dengan perubahan dalam kepekatan substrat kritikal. Keterbatasan ini sering membawa kepada isu seperti "metabolisme limpahan", di mana substrat berlebihan menghasilkan produk sampingan yang menghalang seperti asetat dalam E.coli atau laktat dan ammonia dalam sel mamalia [5].
Dalam kultur sel mamalia - kunci kepada pengeluaran daging yang ditanam - kaedah pemakanan tradisional gagal mengekalkan kepekatan nutrien rendah yang diperlukan untuk mengelakkan produk sampingan ini. Sebagai contoh, mengawal tahap glukosa dan glutamin pada 0.3 mM dan 0.5 mM, masing-masing, boleh mengurangkan produk sampingan yang menghalang dengan ketara, mengurangkan ammonia sebanyak 74% dan laktat sebanyak 63% [3]. Walau bagaimanapun, mencapai tahap ketepatan ini adalah di luar keupayaan sistem PID standard.
Brian Glennon merangkumkan cabaran:
"Kawalan bioproses masih di peringkat awal...disebabkan oleh cabaran yang berkaitan dengan kawalan bioreaktor: pemahaman proses yang lemah, kekurangan pengukuran parameter proses yang relevan dan kesukaran yang wujud dalam mengawal bioproses yang dinamik, kompleks dan tidak linear" [3].
Kemudahan Pelaksanaan
Walaupun terdapat kekurangannya, PID tetap popular kerana kesederhanaannya. Ia memerlukan kuasa pengkomputeran yang minimum dan boleh dilaksanakan dengan peralatan standard [5]. Kebanyakan persediaan bergantung pada mekanisme maklum balas tidak langsung, seperti pH-stat (menyesuaikan untuk perubahan pH daripada penggunaan nutrien) atau DO-stat (bertindak balas terhadap lonjakan oksigen terlarut apabila substrat habis). Walau bagaimanapun, penskalaan sistem PID dihalang oleh kekurangan sensor dalam talian yang boleh dipercayai untuk mengukur kepekatan biomassa atau substrat secara langsung [5].
Di banyak kemudahan berskala kecil hingga sederhana, penyesuaian manual kepada profil pemakanan - yang sering dilakukan pada selang 24 jam - masih biasa. Pendekatan ini bertentangan dengan inisiatif Teknologi Analisis Proses (PAT) FDA, yang menyokong kawalan automatik masa nyata [4]. Intervensi manual ini lebih menonjolkan cabaran dalam melaksanakan PID dengan cara yang boleh diskalakan dan cekap.
Kebolehskalaan untuk Pengeluaran Daging Ternak
Apabila pengeluaran meningkat, batasan PID menjadi lebih jelas. Bioproses berskala besar memerlukan penyesuaian pemakanan substrat yang tepat untuk mengurus faktor seperti pemindahan jisim, pencampuran, pemindahan haba, dan pengoksigenan [5]. Parameter penalaan tetap tidak dapat menangani fluktuasi proses yang ketara yang berlaku semasa larian penapaian [5]. Behzad Moshiri menunjukkan:
"Kaedah kawalan konvensional tidak berjaya dalam tugas seperti ini [mengawal bioproses]... mereka sering tidak mencukupi untuk bioreaktor bukan linear yang sangat tidak stabil" [9].
Contohnya, dalam kajian yang melibatkan pengeluaran penisilin, sifat bioproses yang sangat bukan linear dan tidak stabil menyebabkan sistem PID tradisional gagal dalam mengekalkan penjejakan set-point yang cekap [9].
Dalam pengeluaran daging yang ditanam, di mana konsistensi dan pengoptimuman hasil adalah kritikal, batasan ini menimbulkan cabaran besar. Walaupun PID boleh mengendalikan tugas yang lebih mudah seperti kawalan pH atau oksigen terlarut, sifat reaktifnya dan ketidakmampuannya untuk menguruskan dinamik nutrien yang kompleks dan berskala besar menjadikannya tidak sesuai untuk keperluan lanjutan sistem pengeluaran daging yang ditanam.
Kawalan Prediktif Model
sbb-itb-ffee270
Kelebihan dan Kekurangan
Sistem Kawalan MPC vs PID dalam Perbandingan Prestasi Bioreaktor
Memperluaskan perbandingan prestasi terdahulu, bahagian ini meneliti kebaikan dan keburukan menggunakan Kawalan Prediktif Model (MPC) berbanding kawalan Proportional-Integral-Derivative (PID) untuk mengoptimumkan bioreaktor.
Dalam bioreaktor fed-batch sel mamalia, MPC mengatasi algoritma PI tradisional dengan mengurangkan ralat penjejakan set-point kepekatan glukosa sebanyak 5.1% dan meningkatkan kepekatan produk akhir sebanyak 3.9%[2] . Kebolehan ramalan ini amat penting dalam sistem daging yang diternak, di mana mengekalkan tahap nutrien yang tepat menghalang pembentukan produk sampingan yang menghalang.
Perbezaan asas antara kedua-dua strategi ini adalah pendekatan mereka terhadap kawalan. Kawalan PID adalah reaktif, menangani penyimpangan hanya selepas ia berlaku. MPC, sebaliknya, adalah proaktif, menggunakan model proses untuk meramalkan tingkah laku masa depan dan menyesuaikan input dengan sewajarnya. Walau bagaimanapun, prestasi yang lebih baik ini datang dengan beberapa kompromi.
MPC memerlukan pemodelan proses yang terperinci dan sumber pengkomputeran yang lebih besar, manakala pengawal PID lebih mudah untuk dilaksanakan. Sistem PID boleh dijalankan pada Pengawal Logik Boleh Atur Cara (PLC) standard dengan pemodelan yang minimum, manakala MPC memerlukan PC yang diintegrasikan dengan pengawal bioproses[3][4]. Konstantins Dubencovs dari Institut Kimia Kayu Negeri Latvia menyatakan:
"MPC adalah satu-satunya kaedah yang secara praktikal dapat menyediakan penggunaan model matematik dalam kawalan proses bioteknologi menggunakan peralatan PC standard."[4]
Berikut adalah perbandingan sebelah-menyebelah bagi kedua-dua pendekatan:
| Ciri | Kawalan PID Tradisional | Kawalan Prediktif Model (MPC) |
|---|---|---|
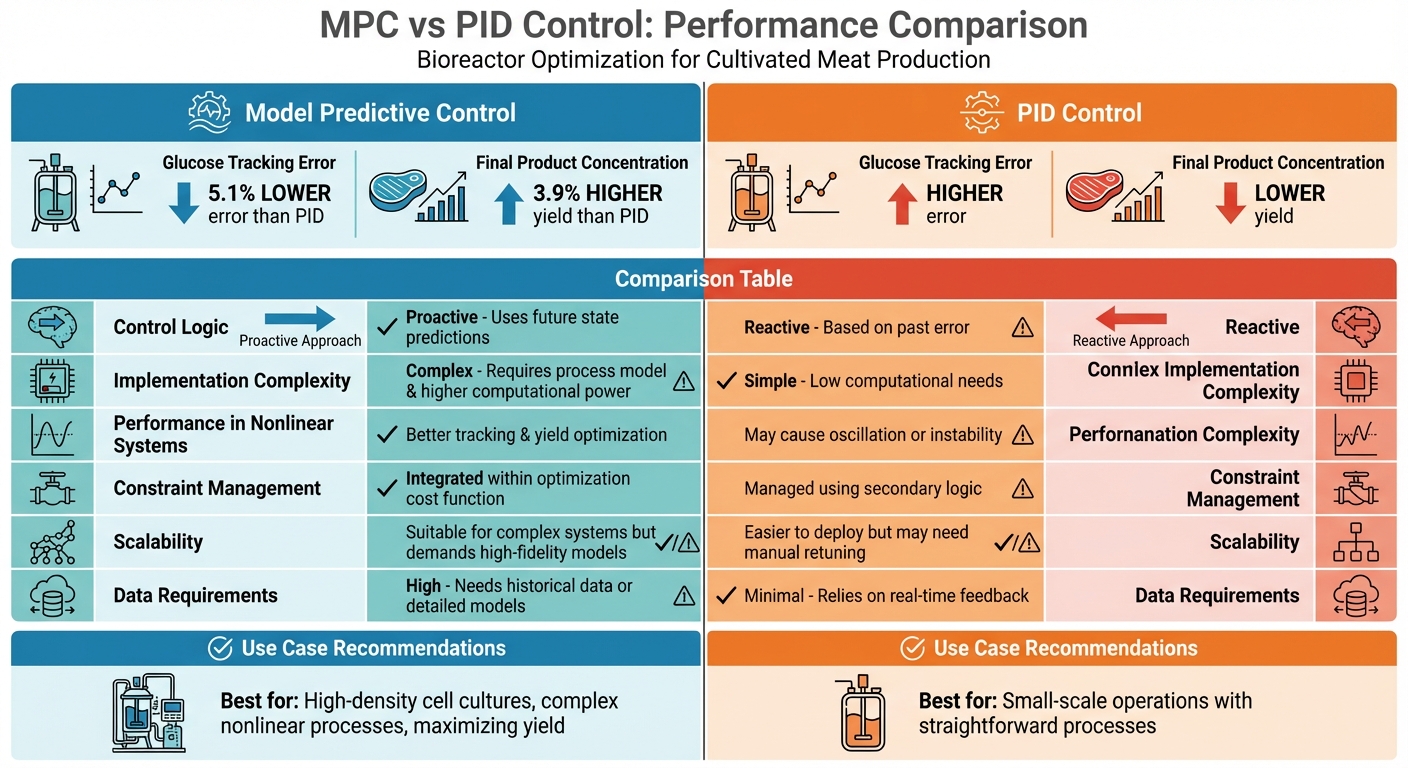
| Logik Kawalan | Reaktif; berdasarkan ralat masa lalu | Proaktif; menggunakan ramalan keadaan masa depan |
| Kerumitan Pelaksanaan | Mudah; keperluan pengiraan rendah | Kompleks; memerlukan model proses dan kuasa pengiraan lebih tinggi |
| Prestasi dalam Sistem Tak Linear | Mungkin menyebabkan osilasi atau ketidakstabilan | Menawarkan penjejakan dan pengoptimuman hasil yang lebih baik |
| Pengurusan Kekangan | Diuruskan menggunakan logik sekunder | Diintegrasikan dalam fungsi kos pengoptimuman |
| Kebolehskalaan | Lebih mudah untuk digunakan tetapi mungkin memerlukan penalaan semula secara manual | Sesuai untuk sistem yang kompleks tetapi memerlukan model berketepatan tinggi |
| Keperluan Data | Minimum; bergantung pada maklum balas masa nyata | Tinggi; memerlukan data sejarah atau model terperinci |
Perbandingan ini menekankan pertukaran antara kesederhanaan dan prestasi. Pilihan antara PID dan MPC bergantung kepada skala operasi dan sumber teknikal yang tersedia.
Kesimpulan
Model Predictive Control (MPC) menawarkan kelebihan yang jelas berbanding sistem PID tradisional dalam mengoptimumkan prestasi bioreaktor, terutamanya untuk pengeluaran daging yang diternak. Dalam bidang ini, di mana kawalan persekitaran yang tepat secara langsung mempengaruhi kualiti dan hasil produk, MPC memberikan manfaat yang boleh diukur. Sebagai contoh, ia meningkatkan ketepatan penjejakan glukosa sebanyak 5.1% dan meningkatkan kepekatan produk akhir sebanyak 3.9% berbanding pendekatan konvensional[2]. Kemampuan ramalan ini amat kritikal dalam kultur sel berketumpatan tinggi, di mana mengekalkan keseimbangan nutrien menghalang pengumpulan produk sampingan yang berbahaya.
MPC adalah penyelesaian utama apabila memaksimumkan hasil atau menguruskan proses yang kompleks dan tidak linear.Ia cemerlang dalam menangani kebolehubahan tinggi, bunyi pengukuran, atau selang pensampelan yang dilanjutkan, menawarkan tahap ketahanan yang sistem PID tidak dapat tandingi. Walau bagaimanapun, untuk operasi berskala kecil dengan proses yang mudah, kawalan PID mungkin masih menjadi pilihan yang lebih kos efektif. Perbezaan antara pendekatan proaktif MPC dan sifat reaktif kawalan PID menonjolkan nilai strategiknya dalam pengeluaran daging kultivasi berprestasi tinggi.
Kemajuan dalam kuasa pengkomputeran dan alat seperti Teknologi Analisis Proses (e.g. , spektroskopi Raman dan sensor NIR) telah menjadikan pelaksanaan MPC lebih mudah diakses. Teknologi ini membolehkan pengoptimuman masa nyata menggunakan persediaan perkakasan standard, mengurangkan halangan untuk penerimaan[5].
Bagi pengeluar daging kultivasi, mendapatkan sensor bioreaktor khusus, instrumen analisis, dan peralatan kawalan adalah penting untuk integrasi MPC yang berjaya. Platform seperti
MPC mewakili peralihan penting dalam kawalan bioreaktor, bergerak dari sistem reaktif kepada pendekatan "kualiti-dengan-reka bentuk" yang bersifat ramalan. Apabila pengeluaran daging yang diternak meningkat dari makmal ke operasi komersial, MPC akan memainkan peranan penting dalam mengekalkan kualiti produk yang konsisten sambil memacu kecekapan operasi. Evolusi ini menandakan langkah maju yang signifikan dalam biopembuatan [3].
Soalan Lazim
Apakah data dan sensor yang diperlukan untuk menjalankan MPC dalam bioreaktor?
Menjalankan Kawalan Ramalan Model (MPC) dalam bioreaktor melibatkan penggunaan sensor untuk menjejaki pembolehubah proses kritikal. Ini termasuk faktor seperti kepekatan substrat (seperti glukosa), tahap oksigen terlarut, pH, suhu, dan pengukuran biojisim.Untuk mengekalkan kawalan yang tepat dan berkesan, sistem pemerolehan data masa nyata adalah penting untuk memantau pembolehubah ini secara berterusan.
Bagaimana anda membina dan mengesahkan model MPC untuk kultur sel bukan linear?
Membangun dan mengesahkan model MPC untuk kultur sel bukan linear bermula dengan mencipta model proses yang tepat. Ini boleh dilakukan menggunakan persamaan prinsip pertama atau memanfaatkan teknik pembelajaran mesin. Langkah seterusnya melibatkan pengesahan model ini dengan membandingkan ramalannya dengan data eksperimen dari bioreaktor. Sebarang perbezaan ditangani dengan menyesuaikan parameter model untuk meningkatkan ketepatan.
Setelah model diintegrasikan ke dalam rangka kerja MPC, pengawal menjalani ujian dalam bioreaktor. Melalui penyesuaian berulang, sistem diselaraskan untuk menetapkan strategi pemakanan yang mengoptimumkan prestasi sambil kekal dalam kekangan proses yang diperlukan.
Bilakah PID masih menjadi pilihan yang lebih baik daripada MPC dalam pengeluaran daging yang ditanam?
Kawalan ramalan model (MPC) sangat berkesan untuk menguruskan dinamik yang rumit dan keadaan yang berubah-ubah dalam proses bioreaktor daging yang ditanam, terutamanya apabila kawalan yang tepat adalah penting. Sebaliknya, kawalan berkadar-integral-terbitan (PID) sering menjadi pilihan yang lebih baik kerana kesederhanaannya dan kemudahan penalaan. PID amat sesuai apabila model dinamik tidak tersedia atau tidak diperlukan. Ia berfungsi dengan baik dalam sistem yang mudah yang memerlukan tindak balas masa nyata yang cepat, di mana ciri-ciri lanjutan MPC mungkin tidak menawarkan banyak manfaat tambahan.









