

การควบคุมเชิงพยากรณ์แบบจำลอง (MPC) กำลังเปลี่ยนแปลงวิธีการจัดการไบโอรีแอคเตอร์ โดยเฉพาะในการผลิตเนื้อสัตว์ที่เพาะเลี้ยง แตกต่างจากระบบ PID ที่ตอบสนองต่อการเปลี่ยนแปลงหลังจากเกิดขึ้นแล้ว MPC ทำนายพฤติกรรมในอนาคต ทำให้สามารถปรับเปลี่ยนได้อย่างแม่นยำในเวลาจริง วิธีการเชิงรุกนี้ลดความแปรปรวน ปรับปรุงผลผลิต และรับประกันความสม่ำเสมอแม้ในขนาดใหญ่
ประเด็นสำคัญ:
- MPC vs PID: MPC ลดข้อผิดพลาดในการติดตามกลูโคสลง 5.1% และปรับปรุงผลผลิตโปรตีนขึ้น 3.9% เมื่อเทียบกับระบบ PID
- ความท้าทายของ PID: PID มีปัญหากับกระบวนการทางชีวภาพที่ไม่เป็นเชิงเส้น ความล่าช้า และสภาวะที่เปลี่ยนแปลงบ่อยครั้ง ส่งผลให้เกิดการสั่นหรือประสิทธิภาพที่ไม่ดี
- ประโยชน์ของ MPC: จัดการกับการรบกวน ปรับปรุงผลผลิต และสนับสนุนการขยายขนาดโดยการรวมเครื่องมือการตรวจสอบขั้นสูง เช่น การสเปกโตรสโกปีแบบรามาน
- อุปสรรคในการดำเนินการ: MPC ต้องการโมเดลที่แม่นยำและทรัพยากรการคำนวณที่สูงขึ้น แต่เทคนิคเช่นการปรับแต่งแบบปรับตัวและการบล็อกอินพุตช่วยแก้ไขปัญหาเหล่านี้ได้.
สำหรับผู้ผลิตเนื้อสัตว์ที่เพาะเลี้ยง MPC เสนอวิธีที่แข็งแกร่งในการจัดการกระบวนการทางชีวภาพที่ซับซ้อน เพื่อให้มั่นใจถึงการควบคุมระดับสารอาหารและการก่อตัวของผลพลอยได้ที่ดีขึ้น ในขณะที่ PID ยังคงเป็นตัวเลือกสำหรับงานที่ง่ายกว่า MPC กำลังเป็นที่นิยมมากขึ้นสำหรับระบบที่สามารถขยายได้และมีประสิทธิภาพสูง.
1. การควบคุมเชิงพยากรณ์แบบจำลอง (MPC)
ประสิทธิภาพภายใต้การรบกวน
MPC ใช้โมเดลทางคณิตศาสตร์เพื่อทำนายพฤติกรรมในอนาคต ทำให้สามารถปรับตัวแปรการควบคุมได้แบบเรียลไทม์ ซึ่งทำให้มีประสิทธิภาพเป็นพิเศษในเครื่องปฏิกรณ์ชีวภาพที่จัดการกับการป้อนข้อมูลที่ผันผวน เสียงรบกวนจากเซ็นเซอร์ และความล่าช้าในการวัด.
ในปี 2021 นักวิจัยจาก Illinois Institute of Technology และ Amgen ได้ทดสอบความสามารถของ MPC ในการจัดการกับการรบกวน พวกเขาพบว่ามันช่วยปรับปรุงการติดตามกลูโคสได้ 5.1% เมื่อเทียบกับการควบคุมแบบสัดส่วน-อินทิกรัล (PI) แบบดั้งเดิมเมื่อจัดการกับความแปรปรวนในความเข้มข้นของกลูโคสและกลูตามีน [2]. ก่อนหน้านี้ในปี 2014 ทีมของ Brian Glennon ได้ประยุกต์ใช้การควบคุมแบบคาดการณ์ล่วงหน้าแบบไม่เชิงเส้น (NMPC) กับไบโอรีแอคเตอร์นำร่องขนาด 15 ลิตร โดยใช้ CHO 320 เซลล์สัตว์เลี้ยงลูกด้วยนม โดยการรวม Kaiser RXN2 Raman spectroscopy สำหรับการตรวจสอบกลูโคสทุกหกนาที NMPC สามารถรักษาจุดตั้งกลูโคสที่ 11 mM ได้อย่างคงที่แม้จะมีความแปรปรวนของกระบวนการและเสียงรบกวนของเซ็นเซอร์ที่สำคัญ [3].
กลยุทธ์ MPC ใหม่ยังคงผลักดันขอบเขตต่อไป ในเดือนมีนาคม 2026 Lipe Carmel และ Giacomo Sartori ได้แนะนำกลยุทธ์การควบคุมการไหลเข้าหลายทาง (MIC) สำหรับการหมัก Corynebacterium glutamicumวิธีการของพวกเขาที่ปรับการป้อนสารอาหารและอัตราการเจือจางพร้อมกัน ลดการเกินเป้าหมายลง 78.0% เมื่อทำการติดตามจุดตั้งค่ามวลชีวภาพที่ 7.0, 13.0, และ 15.7 กรัม/ลิตรในรอบเดียว [6].
การปรับเชิงรุกเหล่านี้ไม่เพียงแต่ทำให้ตัวแปรสำคัญมีเสถียรภาพ แต่ยังเปิดทางให้ได้ผลผลิตโดยรวมที่ดีขึ้นด้วย
การเพิ่มประสิทธิภาพของผลผลิต
MPC เปลี่ยนจุดสนใจจากการรักษาจุดตั้งค่าระหว่างกลางไปสู่การเพิ่มผลลัพธ์ของชุดสุดท้ายให้สูงสุด ซึ่งเป็นสิ่งสำคัญสำหรับการผลิตเนื้อสัตว์ที่เพาะเลี้ยง ซึ่งการบรรลุผลลัพธ์ที่มีคุณภาพสูงและสม่ำเสมอในระดับใหญ่เป็นความท้าทายหลัก
ตัวอย่างเช่น ทีมของ Mudassir M. Rashid แสดงให้เห็นว่าอัลกอริทึมการควบคุมเชิงคาดการณ์คุณลักษณะคุณภาพที่สำคัญช่วยเพิ่มความเข้มข้นของผลิตภัณฑ์ขึ้น 3.9% เมื่อสิ้นสุดการทำงานเมื่อเทียบกับวิธีการแบบดั้งเดิม [2]. ในทำนองเดียวกัน การรวมโมเดลการเรียนรู้ของเครื่องเข้ากับระบบ MPC ได้ปรับปรุงการผลิตโปรตีนขั้นสุดท้ายมากกว่า 2% เมื่อเทียบกับค่าเฉลี่ยในอดีต [1].
แม้ว่าผลลัพธ์จะมีแนวโน้มที่ดี การนำ MPC ไปใช้ก็มีความท้าทายของตัวเอง
ความง่ายในการนำไปใช้
แม้จะมีข้อดี การนำ MPC ไปใช้ในการผลิตเนื้อสัตว์เพาะเลี้ยงต้องเผชิญกับอุปสรรคที่สำคัญ ประสิทธิภาพของระบบขึ้นอยู่กับโมเดลทางคณิตศาสตร์ที่แม่นยำซึ่งสามารถจับความซับซ้อนของไดนามิกส์ของไบโอรีแอคเตอร์ได้ ตามที่ Touraj Eslami และ Alois Jungbauer อธิบาย:
"ประสิทธิภาพของการออกแบบฟีดแบ็คใด ๆ ถูกจำกัดโดยพื้นฐานด้วยไดนามิกส์ของระบบและความแม่นยำของโมเดล" [8].
โมเดลที่ไม่เป็นเชิงเส้น แม้ว่าจะมีพลัง แต่ต้องการทรัพยากรการคำนวณสูงและอาจทำให้เกิดความล่าช้าในการเพิ่มประสิทธิภาพแบบเรียลไทม์ [8]. นอกจากนี้ การเพิ่มประสิทธิภาพที่ไม่เป็นเชิงเส้นของ Nonlinear MPC อาจนำไปสู่จุดต่ำสุดในท้องถิ่น ซึ่งอาจทำให้ประสิทธิภาพลดลงหากไม่ได้รับการเริ่มต้นอย่างถูกต้อง [3]. Konstantins Dubencovs และเพื่อนร่วมงานเน้นถึงประโยชน์ในทางปฏิบัติ:
"MPC เป็นวิธีการที่แทบจะเป็นวิธีเดียวที่สามารถใช้แบบจำลองทางคณิตศาสตร์ในการควบคุมกระบวนการทางชีวเทคโนโลยีโดยใช้คอมพิวเตอร์มาตรฐาน" [4].
กลยุทธ์ Adaptive MPC เสนอวิธีแก้ปัญหาโดยการปรับแต่งพารามิเตอร์ของตัวควบคุมโดยอัตโนมัติเพื่อจัดการกับความแปรปรวนทางชีวภาพ [4] [5]. การบูรณาการเทคโนโลยีการวิเคราะห์กระบวนการ (PAT) เช่น การสเปกโทรสโกปีรามานสำหรับการตรวจสอบบ่อยครั้ง ช่วยลดความจำเป็นในการใช้โครงสร้างพื้นฐานการคำนวณเฉพาะทาง [8] [3]. เทคนิคเช่น 'input blocking' ซึ่งจัดกลุ่มขอบเขตเวลาเป็นบล็อก ยังช่วยจัดการภาระการคำนวณ [8].
ความสามารถในการขยายตัวสำหรับการผลิตเนื้อสัตว์ที่เพาะเลี้ยง
ความสามารถของ MPC ในการจัดการกับความผิดปกติและเพิ่มผลผลิตให้สูงสุดทำให้เป็นตัวเลือกที่แข็งแกร่งสำหรับการขยายการผลิตเนื้อสัตว์ที่เพาะเลี้ยง มันได้พิสูจน์ตัวเองแล้วในกระบวนการชีวเภสัชกรรมและจุลชีววิทยา ซึ่งมันสามารถตอบสนองข้อจำกัดของกระบวนการที่เข้มงวด [1]. สำหรับการดำเนินงานขนาดใหญ่ MPC จัดการกับความท้าทายเช่นการถ่ายโอนมวลและความร้อนโดยการปรับการป้อนสารตั้งต้นเพื่อให้แน่ใจว่ามีการผสมที่เหมาะสม ระดับออกซิเจน และการระบายความร้อน [5].
ประโยชน์มีความชัดเจน: การควบคุมสารอาหารตามการตอบกลับได้เพิ่มระดับแอนติบอดีโมโนโคลนอลขึ้น 1.7 เท่า ในขณะที่กลยุทธ์การคาดการณ์ได้ป้องกันการสูญเสียผลิตภัณฑ์ 4.5–10% ในช่วง 30 วัน [3] [7]. Brian Glennon สรุปสถานะปัจจุบันได้อย่างเหมาะสม:
"การควบคุมกระบวนการชีวภาพยังอยู่ในช่วงเริ่มต้นเมื่อเทียบกับภาคเคมีและเภสัชกรรมแบบดั้งเดิม... เนื่องจากความท้าทายที่เกี่ยวข้องกับการควบคุมไบโอรีแอคเตอร์: ความเข้าใจในกระบวนการที่ไม่ดี [และ] การขาดการวัดพารามิเตอร์กระบวนการที่เกี่ยวข้อง" [3].
แม้จะมีความท้าทายเหล่านี้ การผสานรวมการเรียนรู้ของเครื่องเข้ากับแบบจำลองการพยากรณ์ MPC เสนอวิธีการก้าวไปข้างหน้า ความก้าวหน้าเหล่านี้ช่วยชดเชยการขาดแบบจำลองหลักการแรกที่มีความเที่ยงตรงสูง ทำให้ MPC เหมาะสมมากขึ้นสำหรับความต้องการที่ซับซ้อนของการผลิตเนื้อสัตว์ที่เพาะเลี้ยง [1]. สำหรับบริษัทในพื้นที่นี้ แพลตฟอร์มเช่น
2.การควบคุม PID และวิธีการแบบดั้งเดิมอื่น ๆ
ประสิทธิภาพภายใต้การรบกวน
ในขณะที่การควบคุมแบบคาดการณ์ล่วงหน้า (MPC) โดดเด่นในการคาดการณ์การเปลี่ยนแปลง ตัวควบคุม PID (proportional-integral-derivative) แบบดั้งเดิมมีข้อเสียที่น่าสังเกต ตัวควบคุม PID ซึ่งใช้กันอย่างแพร่หลายในเทคโนโลยีชีวภาพ ทำงานแบบตอบสนอง หมายความว่าพวกเขาจะตอบสนองหลังจากเกิดการเบี่ยงเบนเท่านั้น วิธีการตอบสนองนี้มีปัญหากับความไม่เชิงเส้นและลักษณะที่ขึ้นอยู่กับเวลาในกระบวนการทางชีวภาพ ทำให้ PID มีประสิทธิภาพน้อยลงในสภาพแวดล้อมดังกล่าว [5][9].
ปัญหาสำคัญคือระบบ PID ที่มีพารามิเตอร์การปรับแต่งคงที่มักจะไม่สามารถรักษาเสถียรภาพได้เมื่อพลวัตของกระบวนการเปลี่ยนแปลงอย่างมีนัยสำคัญในระหว่างรอบการเพาะเลี้ยง [5]. ตัวอย่างเช่น ในการเพาะเลี้ยงเซลล์สัตว์เลี้ยงลูกด้วยนม ความล่าช้าในการวัด - บางครั้งนานถึง 24 ชั่วโมง - ลดประสิทธิภาพของ PID ลงอีก [3]. ความล่าช้าเหล่านี้ป้องกันการปรับเปลี่ยนที่ทันเวลา นำไปสู่การสั่นหรือข้อผิดพลาดคงที่ในสภาพแวดล้อมที่ไม่เป็นเชิงเส้นสูง [3].
ช่องว่างด้านประสิทธิภาพระหว่าง PID และ MPC ได้รับการสนับสนุนจากข้อมูล ในการศึกษาปี 2021 โดย Mudassir M. Rashid, Satish J. Parulekar, และ Ali Cinar ระบบ PID แสดงข้อผิดพลาดในการติดตามที่สูงกว่า 5.1% สำหรับจุดตั้งค่าความเข้มข้นของกลูโคสเมื่อเทียบกับ MPC ภายใต้สภาวะของการรบกวนที่ไม่ทราบและเสียงรบกวนในการวัด [2]. นอกจากนี้ สัญญาณ PID มักถูกบิดเบือนโดยเสียงรบกวนจากเครื่องปฏิกรณ์ชีวภาพจากการเติมอากาศ โฟม และกระบวนการผสม [5].
การเพิ่มประสิทธิภาพของผลผลิต
หนึ่งในความท้าทายหลักของ PID คือความไม่สามารถในการทำนายการเปลี่ยนแปลงทางเมตาบอลิซึมหรือปรับตัวให้เข้ากับการเปลี่ยนแปลงในความเข้มข้นของสารตั้งต้นที่สำคัญ ข้อจำกัดนี้มักนำไปสู่ปัญหาเช่น "การเผาผลาญเกิน" ซึ่งสารตั้งต้นส่วนเกินส่งผลให้เกิดผลพลอยได้ที่ยับยั้งเช่นอะซิเตทใน E.coli หรือ lactate และ ammonia ในเซลล์สัตว์เลี้ยงลูกด้วยนม [5].
ในวัฒนธรรมเซลล์สัตว์เลี้ยงลูกด้วยนม - กุญแจสำคัญในการผลิตเนื้อสัตว์ที่เพาะเลี้ยง - วิธีการให้อาหารแบบดั้งเดิมล้มเหลวในการรักษาความเข้มข้นของสารอาหารต่ำที่จำเป็นเพื่อหลีกเลี่ยงผลพลอยได้เหล่านี้ ตัวอย่างเช่น การควบคุมระดับกลูโคสและกลูตามีนที่ 0.3 mM และ 0.5 mM ตามลำดับ สามารถลดผลพลอยได้ที่ยับยั้งได้อย่างมาก ลดแอมโมเนียลง 74% และแลคเตทลง 63% [3]. อย่างไรก็ตาม การบรรลุความแม่นยำในระดับนี้เกินความสามารถของระบบ PID มาตรฐาน
Brian Glennon สรุปความท้าทาย:
"การควบคุมกระบวนการชีวภาพยังอยู่ในช่วงเริ่มต้น...เนื่องจากความท้าทายที่เกี่ยวข้องกับการควบคุมไบโอรีแอคเตอร์: ความเข้าใจในกระบวนการที่ไม่ดี, การขาดการวัดพารามิเตอร์กระบวนการที่เกี่ยวข้อง และความยากลำบากที่มีอยู่ในการควบคุมกระบวนการชีวภาพซึ่งมีความไดนามิก, ซับซ้อน และไม่เป็นเชิงเส้น" [3].
ความง่ายในการนำไปใช้
แม้จะมีข้อจำกัด, PID ยังคงเป็นที่นิยมเนื่องจากความเรียบง่าย ต้องการพลังการคำนวณน้อยและสามารถนำไปใช้กับอุปกรณ์มาตรฐาน [5]. การตั้งค่าส่วนใหญ่พึ่งพากลไกการตอบกลับทางอ้อม เช่น pH-stat (ปรับสำหรับการเปลี่ยนแปลง pH จากการบริโภคสารอาหาร) หรือ DO-stat (ตอบสนองต่อการเพิ่มขึ้นของออกซิเจนที่ละลายเมื่อสารตั้งต้นหมด) อย่างไรก็ตาม การขยายระบบ PID ถูกขัดขวางโดยการขาดเซ็นเซอร์ออนไลน์ที่เชื่อถือได้สำหรับการวัดความเข้มข้นของชีวมวลหรือสารตั้งต้นโดยตรง [5].
ในหลายๆ โรงงานขนาดเล็กถึงกลาง การปรับโปรไฟล์การให้อาหารด้วยมือ - ซึ่งมักทำในช่วงเวลา 24 ชั่วโมง - ยังคงเป็นเรื่องปกติ วิธีการนี้ขัดแย้งกับโครงการ Process Analytical Technology (PAT) ของ FDA ซึ่งสนับสนุนการควบคุมแบบอัตโนมัติและเรียลไทม์ [4]. การแทรกแซงด้วยมือเหล่านี้ยังเน้นถึงความท้าทายในการนำ PID ไปใช้ในวิธีที่สามารถขยายขนาดได้และมีประสิทธิภาพ
การขยายขนาดสำหรับการผลิตเนื้อสัตว์ที่เพาะเลี้ยง
เมื่อการผลิตขยายขนาดขึ้น ข้อจำกัดของ PID จะยิ่งชัดเจนมากขึ้น กระบวนการชีวภาพขนาดใหญ่ต้องการการปรับการให้อาหารสารตั้งต้นอย่างแม่นยำเพื่อจัดการกับปัจจัยต่างๆ เช่น การถ่ายโอนมวล การผสม การถ่ายโอนความร้อน และการให้ออกซิเจน [5]. พารามิเตอร์การปรับแต่งที่คงที่ไม่สามารถจัดการกับความผันผวนของกระบวนการที่เกิดขึ้นระหว่างการหมักได้ [5]. Behzad Moshiri ชี้ให้เห็นว่า:
"วิธีการควบคุมแบบดั้งเดิมไม่ประสบความสำเร็จในงานดังกล่าว [การควบคุมกระบวนการชีวภาพ]... มักจะไม่เพียงพอสำหรับเครื่องปฏิกรณ์ชีวภาพที่ไม่เสถียรและไม่เชิงเส้นสูง" [9].
ตัวอย่างเช่น ในการศึกษาที่เกี่ยวข้องกับการผลิตเพนิซิลลิน ธรรมชาติที่ไม่เชิงเส้นและไม่เสถียรสูงของกระบวนการชีวภาพทำให้ระบบ PID แบบดั้งเดิมล้มเหลวในการรักษาการติดตามจุดตั้งค่าอย่างมีประสิทธิภาพ [9].
ในการผลิตเนื้อสัตว์ที่เพาะเลี้ยง ซึ่งความสม่ำเสมอและการเพิ่มประสิทธิภาพผลผลิตมีความสำคัญ ข้อจำกัดเหล่านี้นำเสนอความท้าทายที่สำคัญ ในขณะที่ PID สามารถจัดการงานที่ง่ายกว่าเช่นการควบคุม pH หรือออกซิเจนที่ละลายได้ แต่ธรรมชาติที่ตอบสนองและความไม่สามารถจัดการกับพลวัตของสารอาหารที่ซับซ้อนและขนาดใหญ่ทำให้ไม่เหมาะสมสำหรับความต้องการขั้นสูงของระบบการผลิตเนื้อสัตว์ที่เพาะเลี้ยง
การควบคุมเชิงพยากรณ์
sbb-itb-ffee270
ข้อดีและข้อเสีย
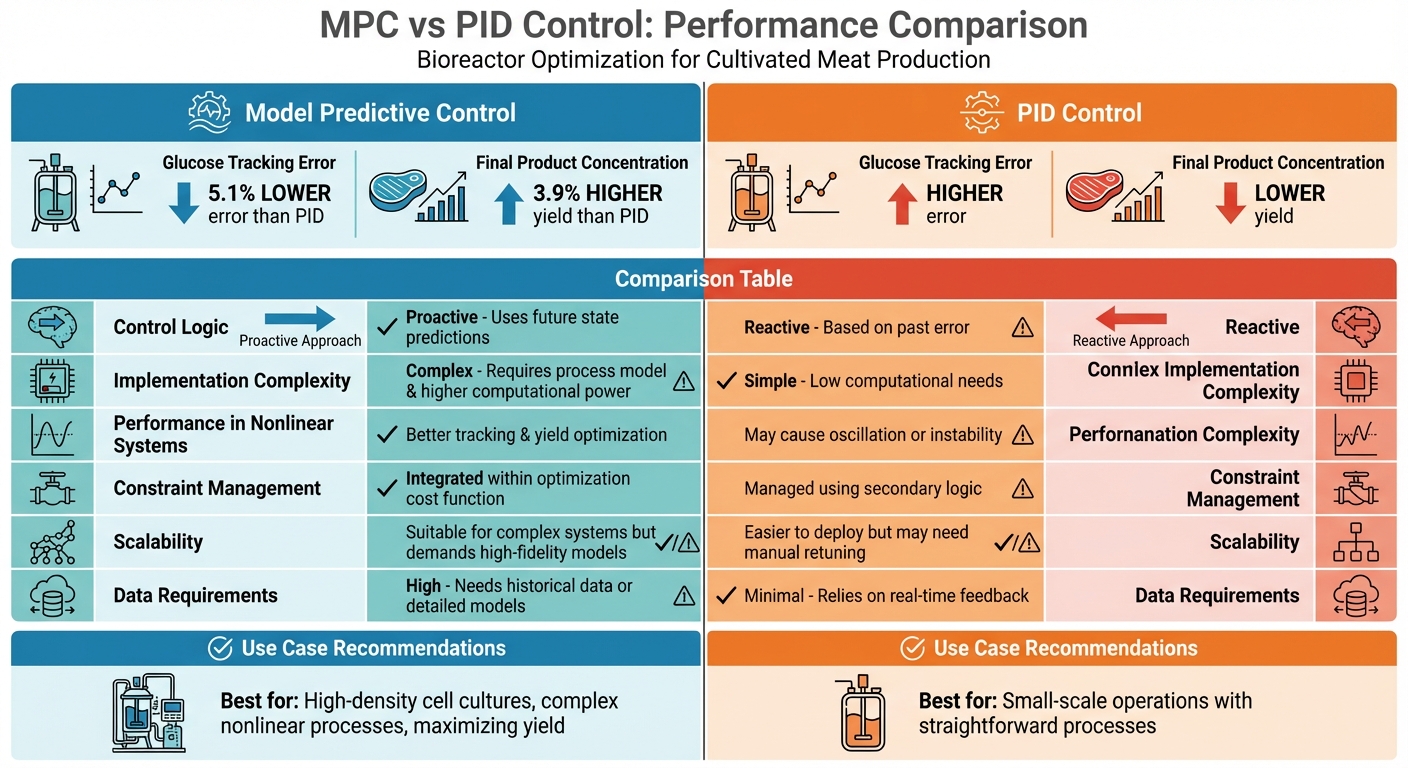
การเปรียบเทียบประสิทธิภาพของระบบควบคุม MPC กับ PID ในเครื่องปฏิกรณ์ชีวภาพ
การขยายจากการเปรียบเทียบประสิทธิภาพก่อนหน้านี้ ส่วนนี้จะตรวจสอบข้อดีและข้อเสียของการใช้การควบคุมเชิงพยากรณ์ (MPC) เทียบกับการควบคุมแบบสัดส่วน-อินทิกรัล-อนุพันธ์ (PID) สำหรับการเพิ่มประสิทธิภาพของเครื่องปฏิกรณ์ชีวภาพ
ในเครื่องปฏิกรณ์ชีวภาพแบบ fed-batch ของเซลล์สัตว์เลี้ยงลูกด้วยนม, MPC มีประสิทธิภาพดีกว่าอัลกอริทึม PI แบบดั้งเดิม โดยลดข้อผิดพลาดในการติดตามจุดตั้งค่าความเข้มข้นของกลูโคสลง 5.1% และเพิ่มความเข้มข้นของผลิตภัณฑ์สุดท้ายขึ้น 3.9%[2] . ความสามารถในการพยากรณ์นี้มีความสำคัญอย่างยิ่งในระบบเนื้อสัตว์ที่เพาะเลี้ยง ซึ่งการรักษาระดับสารอาหารที่แม่นยำจะป้องกันการเกิดผลพลอยได้ที่ยับยั้งการเจริญเติบโต
ความแตกต่างพื้นฐานระหว่างกลยุทธ์ทั้งสองนี้คือวิธีการควบคุม PID control เป็น การตอบสนอง, ที่จัดการกับความเบี่ยงเบนหลังจากที่เกิดขึ้นแล้ว ในขณะที่ MPC เป็น การคาดการณ์ล่วงหน้า, โดยใช้แบบจำลองกระบวนการเพื่อทำนายพฤติกรรมในอนาคตและปรับอินพุตตามนั้น อย่างไรก็ตาม ประสิทธิภาพที่ดีขึ้นนี้มาพร้อมกับการแลกเปลี่ยนบางประการ
MPC ต้องการการสร้างแบบจำลองกระบวนการอย่างละเอียดและทรัพยากรการคำนวณที่มากขึ้น, ในขณะที่ PID controllers นั้นง่ายต่อการใช้งาน ระบบ PID สามารถทำงานบน Programmable Logic Controllers (PLCs) มาตรฐานด้วยการสร้างแบบจำลองที่น้อยที่สุด ในขณะที่ MPC ต้องการ PC ที่รวมเข้ากับตัวควบคุมกระบวนการชีวภาพ[3][4]. Konstantins Dubencovs จาก สถาบันเคมีไม้แห่งรัฐลัตเวีย กล่าว:
"MPC เป็นวิธีการเดียวที่สามารถใช้แบบจำลองทางคณิตศาสตร์ในการควบคุมกระบวนการทางชีวเทคโนโลยีโดยใช้เครื่องคอมพิวเตอร์มาตรฐานได้"[4]
นี่คือการเปรียบเทียบแบบเคียงข้างกันของสองวิธี:
| คุณสมบัติ | การควบคุม PID แบบดั้งเดิม | การควบคุมแบบคาดการณ์ล่วงหน้า (MPC) |
|---|---|---|
| ตรรกะการควบคุม | ตอบสนอง; อิงจากข้อผิดพลาดที่ผ่านมา | เชิงรุก; ใช้การคาดการณ์สถานะในอนาคต |
| ความซับซ้อนในการดำเนินการ | ง่าย; ต้องการการคำนวณต่ำ | ซับซ้อน; ต้องการแบบจำลองกระบวนการและพลังการคำนวณที่สูงขึ้น |
| ประสิทธิภาพในระบบที่ไม่เป็นเชิงเส้น | อาจทำให้เกิดการสั่นหรือความไม่เสถียร | ให้การติดตามและการเพิ่มประสิทธิภาพผลผลิตที่ดีกว่า |
| การจัดการข้อจำกัด | จัดการโดยใช้ตรรกะรอง | รวมอยู่ในฟังก์ชันต้นทุนการเพิ่มประสิทธิภาพ |
| ความสามารถในการขยายตัว | ง่ายต่อการปรับใช้แต่ต้องการการปรับแต่งด้วยตนเอง | เหมาะสำหรับระบบที่ซับซ้อนแต่ต้องการโมเดลที่มีความแม่นยำสูง |
| ข้อกำหนดข้อมูล | น้อยที่สุด; อาศัยการตอบกลับแบบเรียลไทม์ | สูง; ต้องการข้อมูลประวัติหรือโมเดลที่ละเอียด |
การเปรียบเทียบเหล่านี้เน้นย้ำถึงการแลกเปลี่ยนระหว่างความเรียบง่ายและประสิทธิภาพการเลือกใช้ระหว่าง PID และ MPC ขึ้นอยู่กับขนาดของการดำเนินงานและทรัพยากรทางเทคนิคที่มีอยู่เป็นหลัก.
สรุป
การควบคุมแบบคาดการณ์ล่วงหน้า (MPC) มีข้อได้เปรียบที่ชัดเจนเหนือระบบ PID แบบดั้งเดิมในการเพิ่มประสิทธิภาพของไบโอรีแอคเตอร์ โดยเฉพาะอย่างยิ่งสำหรับการผลิตเนื้อสัตว์ที่เพาะเลี้ยง ในสาขานี้ที่การควบคุมสิ่งแวดล้อมที่แม่นยำมีผลโดยตรงต่อคุณภาพและผลผลิตของผลิตภัณฑ์ MPC มอบประโยชน์ที่สามารถวัดได้ ตัวอย่างเช่น มันช่วยเพิ่มความแม่นยำในการติดตามกลูโคสได้ 5.1% และเพิ่มความเข้มข้นของผลิตภัณฑ์สุดท้ายได้ 3.9% เมื่อเทียบกับวิธีการแบบดั้งเดิม[2]. ความสามารถในการคาดการณ์นี้มีความสำคัญอย่างยิ่งในวัฒนธรรมเซลล์ที่มีความหนาแน่นสูง ซึ่งการรักษาสมดุลของสารอาหารจะป้องกันการสะสมของผลพลอยได้ที่เป็นอันตราย.
MPC เป็นทางเลือกที่เหมาะสมเมื่อเพิ่มผลผลิตสูงสุดหรือจัดการกระบวนการที่ซับซ้อนและไม่เป็นเชิงเส้น.มันยอดเยี่ยมในการจัดการกับความแปรปรวนสูง เสียงรบกวนในการวัด หรือช่วงเวลาการสุ่มตัวอย่างที่ยาวนาน โดยมีความแข็งแกร่งในระดับที่ระบบ PID ไม่สามารถเทียบได้ อย่างไรก็ตาม สำหรับการดำเนินงานขนาดเล็กที่มีขั้นตอนที่ไม่ซับซ้อน การควบคุม PID อาจยังคงเป็นตัวเลือกที่คุ้มค่ากว่า ความแตกต่างระหว่างวิธีการเชิงรุกของ MPC และลักษณะการตอบสนองของการควบคุม PID เน้นถึงคุณค่าทางกลยุทธ์ในการผลิตเนื้อสัตว์เพาะเลี้ยงที่มีประสิทธิภาพสูง ความก้าวหน้าในพลังการคำนวณและเครื่องมือเช่น เทคโนโลยีการวิเคราะห์กระบวนการ (e.g. , การสเปกโทรสโกปีแบบรามานและเซ็นเซอร์ NIR) ทำให้การใช้งาน MPC เข้าถึงได้ง่ายขึ้น เทคโนโลยีเหล่านี้ช่วยให้การเพิ่มประสิทธิภาพแบบเรียลไทม์โดยใช้การตั้งค่าฮาร์ดแวร์มาตรฐาน ลดอุปสรรคในการนำไปใช้[5].
สำหรับผู้ผลิตเนื้อสัตว์เพาะเลี้ยง การจัดหาตัวเซ็นเซอร์ไบโอรีแอคเตอร์เฉพาะทาง เครื่องมือวิเคราะห์ และอุปกรณ์ควบคุมเป็นสิ่งสำคัญสำหรับการบูรณาการ MPC ที่ประสบความสำเร็จ Platforms likeMPC represents a pivotal shift in bioreactor control, moving from reactive systems to a predictive, "quality-by-design" approach. As cultivated meat production scales from the lab to commercial operations, MPC will play an essential role in maintaining consistent product quality while driving operational efficiency. This evolution marks a significant step forward in biomanufacturing[3].
คำถามที่พบบ่อย
ข้อมูลและเซ็นเซอร์ใดบ้างที่จำเป็นสำหรับการใช้งาน MPC ในไบโอรีแอคเตอร์?
การใช้งาน Model Predictive Control (MPC) ในไบโอรีแอคเตอร์เกี่ยวข้องกับการใช้เซ็นเซอร์เพื่อติดตามตัวแปรกระบวนการที่สำคัญ ซึ่งรวมถึงปัจจัยต่างๆ เช่น ความเข้มข้นของสารตั้งต้น (เช่น กลูโคส) ระดับออกซิเจนที่ละลาย ค่า pH อุณหภูมิ และการวัดมวลชีวภาพเพื่อรักษาการควบคุมที่แม่นยำและมีประสิทธิภาพ ระบบการเก็บข้อมูลแบบเรียลไทม์เป็นสิ่งจำเป็นสำหรับการตรวจสอบตัวแปรเหล่านี้อย่างต่อเนื่อง.
คุณจะสร้างและตรวจสอบความถูกต้องของโมเดล MPC สำหรับวัฒนธรรมเซลล์ที่ไม่เป็นเชิงเส้นได้อย่างไร?
การพัฒนาและตรวจสอบความถูกต้องของโมเดล MPC สำหรับวัฒนธรรมเซลล์ที่ไม่เป็นเชิงเส้นเริ่มต้นด้วยการสร้างโมเดลกระบวนการที่แม่นยำ ซึ่งสามารถทำได้โดยใช้ สมการหลักการแรก หรือใช้ เทคนิคการเรียนรู้ของเครื่อง. ขั้นตอนต่อไปคือการตรวจสอบความถูกต้องของโมเดลนี้โดยการเปรียบเทียบการคาดการณ์กับข้อมูลการทดลองจากเครื่องปฏิกรณ์ชีวภาพ ความคลาดเคลื่อนใด ๆ จะได้รับการแก้ไขโดยการปรับพารามิเตอร์ของโมเดลเพื่อปรับปรุงความแม่นยำ.
เมื่อโมเดลถูกรวมเข้ากับกรอบงาน MPC ตัวควบคุมจะได้รับการทดสอบภายในเครื่องปฏิกรณ์ชีวภาพ ผ่านการปรับเปลี่ยนซ้ำ ๆ ระบบจะถูกปรับแต่งเพื่อสร้างกลยุทธ์การให้อาหารที่เพิ่มประสิทธิภาพในขณะที่ยังคงอยู่ภายในข้อจำกัดของกระบวนการที่ต้องการ
เมื่อใดที่ PID ยังคงเป็นตัวเลือกที่ดีกว่า MPC ในการผลิตเนื้อสัตว์เพาะเลี้ยง?
การควบคุมแบบคาดการณ์ล่วงหน้า (MPC) มีประสิทธิภาพสูงในการจัดการกับพลวัตที่ซับซ้อนและสภาวะที่เปลี่ยนแปลงของกระบวนการในเครื่องปฏิกรณ์ชีวภาพสำหรับเนื้อสัตว์เพาะเลี้ยง โดยเฉพาะเมื่อการควบคุมที่แม่นยำเป็นสิ่งสำคัญ ในทางกลับกัน การควบคุมแบบสัดส่วน-อินทิกรัล-อนุพันธ์ (PID) มักเป็นตัวเลือกที่ดีกว่าเนื่องจากความเรียบง่ายและความง่ายในการปรับแต่ง PID เหมาะสมอย่างยิ่งเมื่อไม่มีหรือไม่จำเป็นต้องใช้แบบจำลองพลวัต มันทำงานได้ดีในระบบที่ไม่ซับซ้อนที่ต้องการการตอบสนองแบบเรียลไทม์อย่างรวดเร็ว ซึ่งคุณสมบัติขั้นสูงของ MPC อาจไม่ให้ประโยชน์เพิ่มเติมมากนัก









