

モデル予測制御(MPC)は、特に培養肉の生産においてバイオリアクターの管理方法を変革しています。PIDシステムとは異なり、MPCは将来の動作を予測し、リアルタイムで正確な調整を可能にします。この積極的なアプローチは、変動を減らし、製品の収量を向上させ、大規模でも一貫性を確保します。
主なポイント:
- MPC vs PID: MPCは、PIDシステムと比較してグルコース追跡誤差を5.1%削減し、タンパク質収量を3.9%向上させます。
- PIDの課題: PIDは非線形の生物学的プロセス、遅延、変化する条件に苦労し、しばしば振動や非効率を引き起こします。
- MPCの利点: 乱れを処理し、収量を最適化し、ラマン分光法のような高度なモニタリングツールを統合することでスケーラビリティをサポートします。
- 実装の障害: MPCは正確なモデルと高い計算資源を必要としますが、適応チューニングや入力ブロッキングのような技術がこれらの課題に対処するのに役立ちます。
培養肉の生産者にとって、MPCは複雑なバイオプロセスを管理するための堅牢な方法を提供し、栄養レベルや副産物の形成をより良く制御します。PIDはより単純なタスクには依然として選択肢として残りますが、MPCはスケーラブルで高性能なシステムのための選択肢としてますます好まれています。
1. モデル予測制御 (MPC)
外乱下での性能
MPCは数学モデルを使用して将来の挙動を予測し、リアルタイムで制御変数を調整することができます。これにより、変動する流入フィード、センサーノイズ、測定の遅延に対処するバイオリアクターにおいて特に効果的です。
2021年、イリノイ工科大学とアムジェン の研究者たちは、MPCの外乱処理能力をテストしました。彼らは、グルコースとグルタミン濃度の変動を管理する際に、従来の比例積分(PI)制御と比較して、グルコース追跡が5.1%向上することを発見しました [2]. 以前、2014年に、ブライアン・グレノンのチームは、15リットルのパイロットバイオリアクターに非線形モデル予測制御(NMPC)を適用しました。CHO 320哺乳類細胞を使用し、グルコースモニタリングのためにカイザーRXN2ラマン分光法を6分ごとに統合することで、NMPCはプロセスの大きな変動とセンサーノイズにもかかわらず、安定した11 mMのグルコース設定値を維持しました [3].
新しいMPC戦略は、引き続き限界を押し広げています。2026年3月、リペ・カルメルとジャコモ・サルトリは、コリネバクテリウム・グルタミクム発酵のためのマルチインフロー制御(MIC)戦略を導入しました。彼らのアプローチは、栄養素の投入と希釈率を同時に調整することで、7.0、13.0、および15.7 g/Lのバイオマス設定値を単一のランで追跡する際のオーバーシュートを78.0%削減しました [6].
これらの積極的な調整は、主要な変数を安定させるだけでなく、全体的な収量の向上への道を開きます。
収量の最適化
MPCは、中間設定値の単なる維持から最終バッチの成果を最大化することに焦点を移します。これは、スケールで一貫した高品質の結果を達成することが大きな課題である培養肉の生産にとって重要です。
例えば、Mudassir M. Rashidのチームは、重要な品質属性予測制御アルゴリズムが従来の方法と比較してランの終了時に製品濃度を3.9%向上させたことを示しました[2]. 同様に、MPCシステムに機械学習モデルを組み込むことで、過去の平均と比較して最終的なタンパク質生産が2%以上向上しました[1].
結果は有望ですが、MPCの実装には独自の課題があります。
実装の容易さ
その利点にもかかわらず、培養肉生産にMPCを導入するには、重要な障害を克服する必要があります。システムの効果は、バイオリアクターの動態の複雑さを捉える正確な数学モデルに依存しています。Touraj EslamiとAlois Jungbauerは次のように説明しています:
「フィードバック設計の効果は、基本的にシステム動態とモデルの精度によって制限されます」[8].
非線形モデルは強力である一方で、高い計算資源を要求し、リアルタイム最適化に遅延を引き起こす可能性があります[8]. さらに、非線形MPCの非凸最適化は、適切に初期化されていない場合、局所的な最小値に陥り、パフォーマンスを損なう可能性があります[3]. Konstantins Dubencovsと同僚はその実用性を強調しています:
"MPCは、標準的なPC機器を使用してバイオテクノロジーのプロセス制御に数学モデルを利用できる唯一の方法です" [4].
適応型MPC戦略は、生物学的変動性に対応するためにコントローラパラメータを自動的に調整することで解決策を提供します[4] [5]. ラマン分光法などのプロセス分析技術(PAT)を統合することで、頻繁なモニタリングが可能になり、専門的なコンピューティングインフラの必要性が減少します[8] [3]. '入力ブロッキング'のような技術は、時間の範囲をブロックに分けることで、計算負荷の管理にも役立ちます [8].
培養肉生産のスケーラビリティ
MPCの外乱管理能力と収量最適化能力は、培養肉生産のスケールアップにおいて有力な候補となります。バイオ医薬品や微生物プロセスで、厳しいプロセス制約を満たすことがすでに証明されています [1]. 大規模なオペレーションでは、MPCは質量と熱の移動の課題に取り組み、適切な混合、酸素レベル、冷却を確保するために基質供給を調整します [5].
その利点は明らかです:フィードバックに基づく栄養制御により、モノクローナル抗体の力価が1.7倍に増加し、予測戦略により30日間で4.5–10%の製品損失が防止されました [3] [7]. ブライアン・グレノンは現在の状況を適切に要約しています:
「バイオプロセスの制御は、化学および伝統的な製薬セクターと比較してまだ初期段階にあります... これは、バイオリアクター制御に関連する課題、すなわちプロセスの理解不足や関連するプロセスパラメータの測定の欠如が一因です」[3].
これらの課題があるにもかかわらず、機械学習をMPC予測モデルに統合することは前進の道を提供します。これらの進歩は、高忠実度の第一原理モデルの欠如を補い、MPCを培養肉生産の複雑な要求にますます適したものにします[1]. この分野の企業にとって、
2.PID制御とその他の従来の方法
外乱下での性能
モデル予測制御(MPC)は変化を予測するのに優れていますが、従来のPID(比例-積分-微分)コントローラーには顕著な欠点があります。バイオテクノロジーで広く使用されているPIDコントローラーは、反応的に動作し、偏差が発生した後にのみ応答します。この反応的アプローチは、生物学的プロセスの非線形性と時間依存性に苦労し、そのような設定ではPIDの効果が低下します[5][9].
主な問題は、固定された調整パラメータを持つPIDシステムが、培養サイクル中にプロセス動態が大きく変化した場合に安定性を維持できないことです[5]. 例えば、哺乳類細胞培養では、測定の遅延が24時間にも及ぶことがあり、PIDの効果をさらに低下させます[3]. これらの遅延は、タイムリーな調整を妨げ、高度に非線形な環境での振動や静的誤差を引き起こします[3].
PIDとMPCの性能差はデータによって裏付けられています。Mudassir M. Rashid、Satish J. Parulekar、Ali Cinarによる2021年の研究では、未知の外乱や測定ノイズの条件下で、PIDシステムはMPCに比べてグルコース濃度の設定値に対して5.1%高い追跡誤差を示しました[2]. さらに、PID信号はしばしば曝気、泡、混合プロセスからのバイオリアクターのノイズによって歪められます[5].
収率の最適化
PIDの主要な課題の一つは、代謝シフトを予測したり、重要な基質濃度の変化に適応したりすることができないことです。この制限はしばしば「オーバーフローメタボリズム」のような問題を引き起こし、過剰な基質が酢酸のような阻害副産物をもたらしますE. coli または哺乳動物細胞における乳酸とアンモニア [5].
哺乳動物細胞培養では、培養肉の生産において、従来の給餌方法ではこれらの副産物を回避するために必要な低栄養素濃度を維持することができません。例えば、グルコースとグルタミンのレベルをそれぞれ0.3 mMと0.5 mMに制御することで、阻害性副産物を大幅に削減し、アンモニアを74%、乳酸を63%削減することができます [3]. しかし、このレベルの精度を達成することは、標準的なPIDシステムの能力を超えています。
ブライアン・グレノンはこの課題を次のように要約しています:
"バイオプロセスの制御はまだ始まったばかりで...バイオリアクター制御に関連する課題のため: プロセスの理解不足、関連するプロセスパラメータの測定の欠如、および動的で複雑かつ非線形なバイオプロセスの制御に内在する困難さ [3].
実装の容易さ
その限界にもかかわらず、PIDはそのシンプルさから人気があります。最小限の計算能力を必要とし、標準的な機器で実装できます [5]. ほとんどのセットアップは、pH-stat(栄養素消費によるpH変化の調整)やDO-stat(基質が枯渇したときの溶存酸素の急増に対応)などの間接的なフィードバックメカニズムに依存しています。しかし、PIDシステムのスケーリングは、バイオマスや基質濃度を直接測定するための信頼できるオンラインセンサーの欠如によって妨げられています [5].
多くの小規模から中規模の施設では、24時間ごとに行われることが多い給餌プロファイルの手動調整が依然として一般的です。このアプローチは、リアルタイムでの自動制御を推進するFDAのプロセス分析技術(PAT)イニシアチブに反しています。[4]. これらの手動介入は、スケーラブルで効率的な方法でPIDを実装する際の課題をさらに浮き彫りにします。
培養肉生産のスケーラビリティ
生産が拡大するにつれて、PIDの限界がさらに明らかになります。大規模なバイオプロセスでは、質量移動、混合、熱移動、酸素化などの要因を管理するために、正確な基質給餌調整が必要です。[5]. 固定された調整パラメータでは、発酵ラン中に発生する大きなプロセス変動を処理できません。[5]. Behzad Moshiriは次のように指摘しています:
"従来の制御方法はそのようなタスク[バイオプロセスの制御]では成功しません...それらは非常に不安定な非線形バイオリアクターに対してしばしば不十分です"[9].
例えば、ペニシリン生産に関する研究では、バイオプロセスの非常に非線形で不安定な性質が、従来のPIDシステムが効率的なセットポイント追跡を維持することを妨げました[9].
培養肉の生産では、一貫性と収量の最適化が重要であり、これらの制限は大きな課題を提示します。PIDはpHや溶存酸素の制御のような単純なタスクを処理できますが、その反応的な性質と複雑で大規模な栄養動態を管理できないことが、培養肉生産システムの高度な要件には不適切です。
モデル予測制御
sbb-itb-ffee270
利点と欠点
バイオリアクター性能比較におけるMPCとPID制御システム
以前の性能比較を拡大し、このセクションではバイオリアクターの最適化におけるモデル予測制御(MPC)と比例積分微分(PID)制御の利点と欠点を検討します。
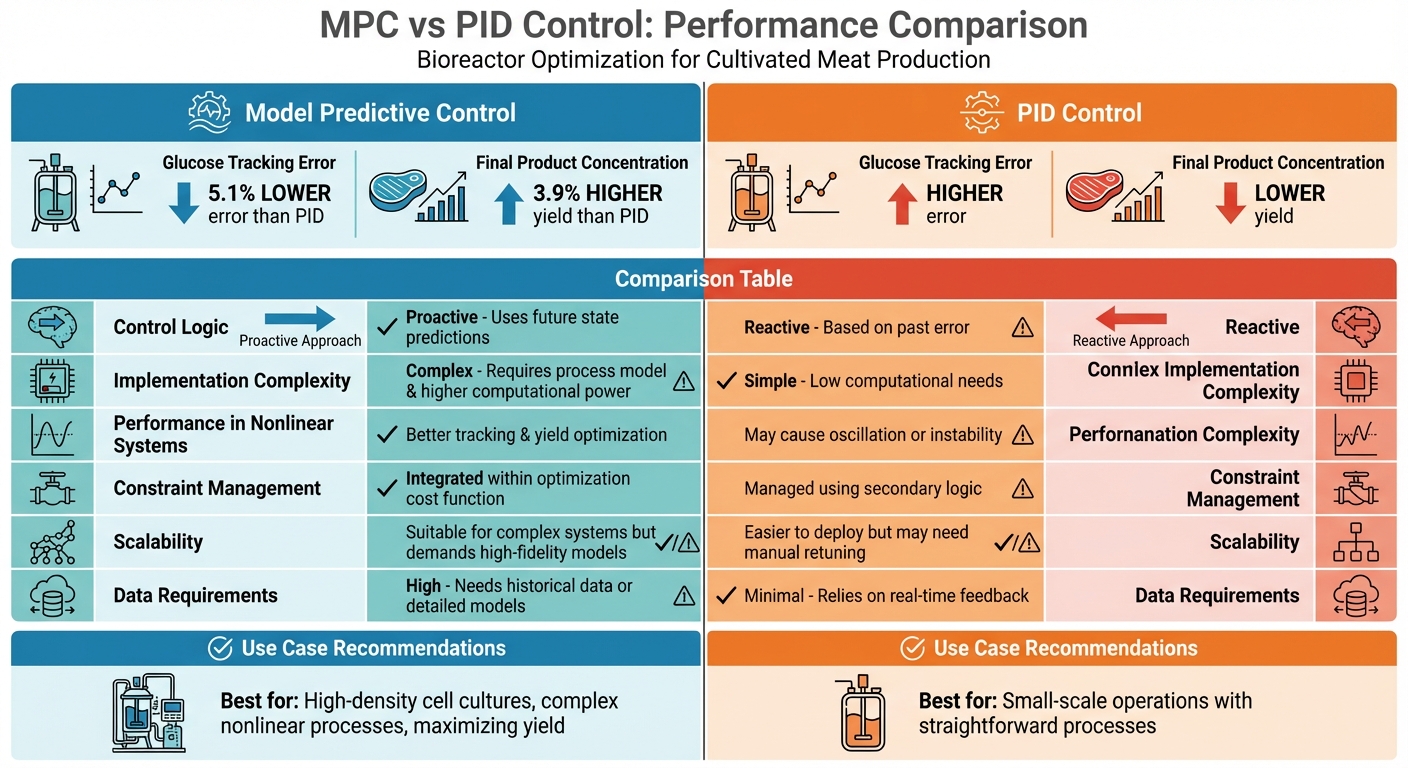
哺乳動物細胞のフィードバッチバイオリアクターでは、MPCは従来のPIアルゴリズムを上回り、グルコース濃度の設定値追跡誤差を5.1%削減し、最終製品濃度を3.9%増加させます[2] . この予測能力は、培養肉システムにおいて特に重要であり、正確な栄養素レベルを維持することで阻害副産物の形成を防ぎます。
これら二つの戦略の基本的な違いは、制御へのアプローチです。PID制御は反応的, であり、偏差が発生した後にのみ対処します。一方、MPCは予測的, であり、プロセスモデルを使用して将来の動作を予測し、それに応じて入力を調整します。しかし、この改善されたパフォーマンスにはいくつかのトレードオフがあります。
MPCは詳細なプロセスモデリングとより多くの計算資源を必要とします, が、PIDコントローラーは実装が簡単です。PIDシステムは、最小限のモデリングで標準のプログラマブルロジックコントローラー(PLC)で実行できますが、MPCはバイオプロセスコントローラーと統合されたPCを必要とします[3][4]. Konstantins Dubencovs はラトビア国立木材化学研究所から次のように述べています:
"MPC は、標準的な PC 機器を使用してバイオテクノロジー プロセスの制御に数学モデルを使用できる唯一の方法です。"[4]
2つのアプローチの比較:
| 特徴 | 従来のPID制御 | モデル予測制御 (MPC) |
|---|---|---|
| 制御ロジック | 反応的; 過去の誤差に基づく | 予測的; 将来の状態予測を使用 |
| 実装の複雑さ | シンプル; 低い計算ニーズ | 複雑; プロセスモデルと高い計算能力が必要 |
| 非線形システムでの性能 | 振動や不安定を引き起こす可能性 | より良い追跡と収量最適化を提供 |
| 制約管理 | 二次ロジックを使用して管理 | 最適化コスト関数に統合 |
| スケーラビリティ | 展開が容易だが、手動での再調整が必要な場合がある | 複雑なシステムに適しているが、高精度モデルが必要 |
| データ要件 | 最小限; リアルタイムフィードバックに依存 | 高い; 過去のデータや詳細なモデルが必要 |
これらの比較は、シンプルさとパフォーマンスのトレードオフを強調しています。PIDとMPCの選択は、主に運用の規模と利用可能な技術リソースに大きく依存します。
結論
モデル予測制御(MPC)は、特に培養肉生産において、バイオリアクターの性能を最適化する上で、従来のPIDシステムに対して明確な利点を提供します。この分野では、正確な環境制御が製品の品質と収量に直接影響を与えるため、MPCは測定可能な利益をもたらします。例えば、グルコース追跡の精度を5.1%向上させ、従来のアプローチと比較して最終製品の濃度を3.9%増加させます[2]. この予測能力は、栄養バランスを維持して有害な副産物の蓄積を防ぐ高密度細胞培養において特に重要です。
MPCは、収量を最大化するか、複雑で非線形なプロセスを管理する際の最適なソリューションです。高い変動性、測定ノイズ、または長いサンプリング間隔を扱うのに優れており、PIDシステムでは到底及ばないレベルの堅牢性を提供します。しかし、単純なプロセスを持つ小規模な運用では、PID制御が依然としてよりコスト効果の高い選択肢であるかもしれません。MPCのプロアクティブなアプローチとPID制御のリアクティブな性質の対比は、高性能な培養肉生産におけるその戦略的価値を際立たせています。
計算能力の進歩とプロセス分析技術(e.g. 、ラマン分光法およびNIRセンサー)などのツールにより、MPCの実装がより身近になりました。これらの技術は、標準的なハードウェアセットアップを使用したリアルタイム最適化を可能にし、導入の障壁を下げます[5].
培養肉の生産者にとって、MPCの統合を成功させるためには、専門的なバイオリアクターセンサー、分析機器、および制御装置の調達が重要です。 Platforms like
MPCは、バイオリアクター制御における重要な変化を表しており、反応システムから予測的な「品質設計」アプローチへと移行しています。培養肉の生産が研究室から商業運営へと拡大する中で、MPCは一貫した製品品質を維持しながら運用効率を向上させる上で重要な役割を果たします。この進化は、バイオ製造における大きな前進を示しています [3].
FAQs
バイオリアクターでMPCを実行するために必要なデータとセンサーは何ですか?
バイオリアクターでモデル予測制御(MPC)を実行するには、重要なプロセス変数を追跡するためのセンサーを使用します。これには、基質濃度(グルコースなど)、溶存酸素レベル、pH、温度、バイオマス測定などの要素が含まれます。正確で効果的な制御を維持するためには、これらの変数を継続的に監視するためのリアルタイムデータ取得システムが不可欠です。
非線形細胞培養のためのMPCモデルをどのように構築し、検証しますか?
非線形細胞培養のためのMPCモデルの開発と検証は、正確なプロセスモデルの作成から始まります。これは、第一原理方程式を使用するか、機械学習技術を活用して行うことができます。次のステップでは、このモデルの予測をバイオリアクターからの実験データと比較して検証します。予測と実験データの間に不一致がある場合は、モデルパラメータを調整して精度を向上させます。
モデルがMPCフレームワークに統合されると、コントローラーはバイオリアクター内でのテストを受けます。反復的な調整を通じて、システムは必要なプロセス制約内で性能を最適化する給餌戦略を確立するために微調整されます。
培養肉の生産において、PIDがMPCよりも優れた選択肢であるのはいつですか?
モデル予測制御(MPC)は、培養肉のバイオリアクタープロセスの複雑な動態と変化する条件を管理するのに非常に効果的であり、特に正確な制御が必要な場合に有効です。一方、比例積分微分(PID)制御は、そのシンプルさと調整の容易さから、しばしばより良い選択肢となります。PIDは、動的モデルが利用できない、または必要ない場合に特に適しています。MPCの高度な機能があまり追加の利益をもたらさない、迅速でリアルタイムの応答を要求する単純なシステムでは、PIDは優れた性能を発揮します。









