

בקרת חיזוי מודלים (MPC) משנה את האופן שבו מנוהלים ביוריאקטורים, במיוחד בייצור בשר מתורבת. בניגוד למערכות PID, שמגיבות לשינויים לאחר שהם מתרחשים, MPC חוזה התנהגויות עתידיות, ומאפשרת התאמות מדויקות בזמן אמת. גישה פרואקטיבית זו מפחיתה את השונות, משפרת את תפוקות המוצר ומבטיחה עקביות גם בקנה מידה גדול.
נקודות מפתח:
- MPC לעומת PID: MPC מפחיתה שגיאות מעקב גלוקוז ב-5.1% ומשפרת את תפוקות החלבון ב-3.9% בהשוואה למערכות PID.
- אתגרים עם PID: PID מתקשה עם תהליכים ביולוגיים לא ליניאריים, עיכובים ותנאים משתנים, מה שלעיתים קרובות גורם לאוסילציות או חוסר יעילות.
- יתרונות MPC: מטפל בהפרעות, ממקסם תפוקות ותומך בהרחבה על ידי שילוב כלים מתקדמים לניטור כמו ספקטרוסקופיית ראמאן.
- מכשולים ביישום: MPC דורש מודלים מדויקים ומשאבי חישוב גבוהים יותר, אך טכניקות כמו כוונון אדפטיבי וחסימת קלט מסייעות להתמודד עם אתגרים אלו.
ליצרני בשר מתורבת, MPC מציע דרך חזקה לניהול תהליכים ביולוגיים מורכבים, ומבטיח שליטה טובה יותר על רמות חומרים מזינים ויצירת תוצרי לוואי. בעוד ש-PID נשארת אפשרות למשימות פשוטות יותר, MPC הופכת יותר ויותר לבחירה המועדפת עבור מערכות בקנה מידה גדול וביצועים גבוהים.
1. בקרת חיזוי מודלים (MPC)
ביצועים תחת הפרעות
MPC משתמש במודלים מתמטיים כדי לחזות התנהגות עתידית, מה שמאפשר לו להתאים משתני בקרה בזמן אמת. זה הופך אותו ליעיל במיוחד בביו-ריאקטורים המתמודדים עם הזנות משתנות, רעש חיישנים ועיכובים במדידה.
בשנת 2021, חוקרים מהמכון הטכנולוגי של אילינוי ו-Amgen בדקו את יכולת ה-MPC להתמודד עם הפרעות. הם מצאו שהוא שיפר את מעקב הגלוקוז ב-5.1% בהשוואה לשליטה פרופורציונלית-אינטגרלית (PI) מסורתית כאשר ניהלו שינויים בריכוזי גלוקוז וגלוטמין [2]. מוקדם יותר, בשנת 2014, הצוות של בריאן גלנון יישם שליטה ניבוית מודלית לא לינארית (NMPC) על ביוריאקטור פיילוט של 15 ליטר תוך שימוש בתאי יונקים CHO 320 . על ידי שילוב ספקטרוסקופיית ראמן Kaiser RXN2 לניטור גלוקוז כל שש דקות, NMPC שמר על נקודת קבע גלוקוז יציבה של 11 mM למרות שונות תהליך משמעותית ורעש חיישנים [3].
אסטרטגיות MPC חדשות יותר ממשיכות לדחוף גבולות. במרץ 2026, ליפה כרמל וג'יאקומו סארטורי הציגו אסטרטגיית שליטה מרובת כניסות (MIC) לתסיסות Corynebacterium glutamicum. הגישה שלהם, אשר התאימה בו זמנית את קלטי המזון וקצבי הדילול, הפחיתה את החריגה ב-78.0% כאשר עקבו אחר נקודות היעד של הביומסה של 7.0, 13.0, ו-15.7 גרם/ליטר בריצה אחת [6].
התאמות פרואקטיביות אלו לא רק מייצבות משתנים מרכזיים אלא גם סוללות את הדרך לתשואה כוללת טובה יותר.
אופטימיזציה של תשואות
MPC מעביר את המיקוד משמירה פשוטה על נקודות יעד ביניים למקסום תוצאות הסדרה הסופיות. זה קריטי לייצור בשר מתורבת, שבו השגת תוצאות עקביות ואיכותיות בקנה מידה היא אתגר משמעותי.
לדוגמה, הצוות של מודאסיר מ. ראשיד הראה שאלגוריתם בקרת איכות קריטית חיזוי שיפר את ריכוז המוצר ב-3.9% בסוף הריצה בהשוואה לשיטות קונבנציונליות [2]. באופן דומה, שילוב מודלים של למידת מכונה במערכות MPC הוביל לשיפור של מעל 2% בייצור החלבון הסופי בהשוואה לממוצעים היסטוריים [1].
בעוד שהתוצאות מבטיחות, יישום MPC מגיע עם סט אתגרים משלו.
קלות יישום
למרות יתרונותיו, פריסת MPC בייצור בשר מתורבת דורשת התגברות על מכשולים משמעותיים. האפקטיביות של המערכת תלויה במודלים מתמטיים מדויקים שתופסים את המורכבות של דינמיקת הביוראקטור. כפי שמסבירים טוראג' אסלאמי ואלויס יונגבאואר:
"האפקטיביות של כל עיצוב משוב מוגבלת באופן בסיסי על ידי דינמיקת המערכת ודיוק המודל" [8].
מודלים לא לינאריים, למרות עוצמתם, דורשים משאבים חישוביים גבוהים ויכולים לגרום לעיכובים באופטימיזציה בזמן אמת [8]. בנוסף, האופטימיזציה הלא-קמורה של MPC לא לינארי יכולה להוביל למינימום מקומי, מה שעלול לפגוע בביצועים אם לא מאותחלת כראוי [3]. קונסטנטינס דובנקובס ועמיתיו מדגישים את השימושיות המעשית שלו:
"MPC הוא למעשה השיטה היחידה שיכולה לספק את השימוש במודלים מתמטיים בשליטה על תהליכים ביוטכנולוגיים באמצעות ציוד מחשב סטנדרטי" [4].
אסטרטגיות MPC אדפטיביות מציעות פתרונות על ידי כיוונון אוטומטי של פרמטרי הבקר כדי להתמודד עם השונות הביולוגית [4] [5]. שילוב טכנולוגיית ניתוח תהליכים (PAT), כמו ספקטרוסקופיית ראמאן לניטור תכוף, מפחית את הצורך בתשתית מחשוב מיוחדת [8] [3]. טכניקות כמו 'חסימת קלט', שמחלקות את אופק הזמן לבלוקים, גם עוזרות לנהל עומס חישובי [8] .
יכולת הרחבה לייצור בשר מתורבת
היכולת של MPC לנהל הפרעות ולמקסם תפוקות הופכת אותו למועמד חזק להרחבת ייצור בשר מתורבת. הוא כבר הוכיח את עצמו בתהליכים ביופרמצבטיים ומיקרוביאליים, שם הוא עומד בדרישות תהליך מחמירות [1]. לפעולות בקנה מידה גדול, MPC מתמודד עם אתגרים כמו העברת מסה וחום על ידי התאמת הזנות מצע כדי להבטיח ערבוב נכון, רמות חמצן וקירור [5].
היתרונות ברורים: בקרת תזונה מבוססת משוב הגדילה את רמות הנוגדנים המונוקלונליים פי 1.7, בעוד שאסטרטגיות חיזוי מנעו אובדן מוצרים של 4.5–10% במשך 30 ימים [3] [7]. בריאן גלנון מסכם בצורה מדויקת את המצב הנוכחי:
"השליטה בתהליכים ביולוגיים נמצאת בשלביה הראשונים בהשוואה למגזרים הכימיים והפרמצבטיים המסורתיים... זאת בין היתר בשל האתגרים הקשורים לשליטה בביו-ריאקטורים: הבנה לקויה של התהליך [ו] היעדר מדידה של פרמטרים רלוונטיים לתהליך" [3].
גם עם אתגרים אלו, שילוב למידת מכונה במודלים תחזיתיים של MPC מציע דרך קדימה. התקדמויות אלו מסייעות לפצות על היעדר מודלים עקרוניים מדויקים, מה שהופך את ה-MPC ליותר מתאים לדרישות המורכבות של ייצור בשר מתורבת [1]. עבור חברות בתחום זה, פלטפורמות כמו
2.PID Control and Other Traditional Methods
ביצועים תחת הפרעות
בעוד ש-Model Predictive Control (MPC) מצטיין בחיזוי שינויים, בקרי PID (פרופורציונלי-אינטגרלי-נגזר) מסורתיים סובלים מחסרונות בולטים. בקרי PID, הנפוצים בשימוש בביוטכנולוגיה, פועלים בצורה תגובתית, כלומר הם מגיבים רק לאחר שהתרחשו סטיות. גישה תגובתית זו מתקשה להתמודד עם אי-לינאריות והטבע התלוי בזמן של תהליכים ביולוגיים, מה שהופך את PID לפחות יעיל בהגדרות כאלה [5][9].
בעיה מרכזית היא שמערכות PID עם פרמטרי כוונון קבועים לעיתים קרובות נכשלות בשמירה על יציבות כאשר הדינמיקה של התהליך משתנה באופן משמעותי במהלך מחזור גידול [5]. לדוגמה, בתרביות תאי יונקים, עיכובי מדידה - לפעמים עד 24 שעות - מפחיתים עוד יותר את היעילות של PID [3]. עיכובים אלה מונעים התאמות בזמן, מה שמוביל לאוסילציות או שגיאות סטטיות בסביבות לא לינאריות במיוחד [3].
הפער בביצועים בין PID ל-MPC מגובה בנתונים. במחקר מ-2021 של מודאסיר מ. ראשיד, סאטיש ג'. פארולקר, ואלי סינאר, מערכות PID הראו שגיאת מעקב גבוהה ב-5.1% עבור נקודות קבועות של ריכוז גלוקוז בהשוואה ל-MPC בתנאים של הפרעות לא ידועות ורעש מדידה [2]. בנוסף, אותות PID מעוותים לעיתים קרובות על ידי רעש ביוריאקטור מהאיוורור, הקצף ותהליכי הערבוב [5].
אופטימיזציה של תפוקות
אחד מהאתגרים המרכזיים של PID הוא חוסר היכולת שלו לחזות שינויים מטבוליים או להסתגל לשינויים בריכוזי סובסטרטים קריטיים. מגבלה זו מובילה לעיתים קרובות לבעיות כמו "מטבוליזם עודף", שבו סובסטרט עודף גורם לתוצרי לוואי מעכבים כמו אצטט ב-E.coli או לקטט ואמוניה בתאי יונקים [5].
בתרביות תאי יונקים - מפתח לייצור בשר מתורבת - שיטות האכלה מסורתיות אינן מצליחות לשמור על ריכוזי חומרים מזינים נמוכים הנדרשים כדי להימנע מתוצרי לוואי אלו. לדוגמה, שליטה ברמות הגלוקוז והגלוטמין ב-0.3 mM ו-0.5 mM, בהתאמה, יכולה להפחית משמעותית תוצרי לוואי מעכבים, לחתוך את האמוניה ב-74% ואת הלקטט ב-63% [3]. עם זאת, השגת רמת דיוק זו היא מעבר ליכולות של מערכות PID סטנדרטיות.
בריאן גלנון מסכם את האתגר:
"השליטה בתהליכים ביולוגיים נמצאת בראשית דרכה... בשל האתגרים הקשורים לשליטה בביו-ריאקטור: הבנה לקויה של התהליך, היעדר מדידה של פרמטרים רלוונטיים בתהליך והקשיים הטבועים בשליטה בתהליכים ביולוגיים שהם דינמיים, מורכבים ולא ליניאריים" [3].
קלות יישום
למרות מגבלותיו, PID נשאר פופולרי בשל פשטותו. הוא דורש כוח חישוב מינימלי וניתן ליישום עם ציוד סטנדרטי [5]. רוב ההתקנות מסתמכות על מנגנוני משוב עקיפים, כמו pH-stat (התאמה לשינויים ב-pH מצריכת חומרים מזינים) או DO-stat (תגובה לעליות בחמצן מומס כאשר מצעים מתכלים). עם זאת, הרחבת מערכות PID מוגבלת בשל היעדר חיישנים מקוונים אמינים למדידה ישירה של ריכוזי ביומסה או מצעים [5].
htmlבמתקנים קטנים עד בינוניים רבים, התאמות ידניות לפרופילי ההזנה - לעיתים קרובות נעשות במרווחים של 24 שעות - עדיין נפוצות. גישה זו מנוגדת ליוזמת FDA לטכנולוגיה אנליטית של תהליכים (PAT), המקדמת שליטה אוטומטית בזמן אמת [4]. התערבויות ידניות אלו מדגישות עוד יותר את האתגרים ביישום PID בצורה ניתנת להרחבה ויעילה.
הרחבה לייצור בשר מתורבת
כאשר הייצור מתרחב, המגבלות של PID הופכות לברורות עוד יותר. תהליכי ביופרוס גדולים דורשים התאמות מדויקות של הזנת מצעים לניהול גורמים כמו העברת מסה, ערבוב, העברת חום וחמצון [5]. פרמטרי כוונון קבועים אינם יכולים להתמודד עם התנודות המשמעותיות בתהליך המתרחשות במהלך ריצות התססה [5]. בהזאד מושירי מציין:
"שיטות בקרה קונבנציונליות אינן מצליחות במשימה כזו [שליטה בתהליכים ביולוגיים]... הן לעיתים קרובות אינן מתאימות לביוראקטורים לא ליניאריים ובלתי יציבים במיוחד" [9].
לדוגמה, במחקרים הכוללים ייצור פניצילין, האופי הלא ליניארי והבלתי יציב של תהליכים ביולוגיים גרם למערכות PID מסורתיות להיכשל בשמירה על מעקב נקודת ייחוס יעיל [9].
בייצור בשר מתורבת, שבו עקביות ואופטימיזציה של תפוקה הן קריטיות, מגבלות אלו מציבות אתגרים משמעותיים. בעוד ש-PID יכול להתמודד עם משימות פשוטות יותר כמו שליטה ב-pH או חמצן מומס, אופיו הריאקטיבי והיכולת המוגבלת שלו לנהל דינמיקה מורכבת ורחבת היקף של חומרים מזינים הופכים אותו לבלתי מתאים לדרישות המתקדמות של מערכות ייצור בשר מתורבת.
בקרת חיזוי מודל
sbb-itb-ffee270
יתרונות וחסרונות
השוואת ביצועים של מערכות בקרת MPC לעומת PID בביו-ריאקטורים
בהרחבה על השוואות ביצועים קודמות, חלק זה בוחן את היתרונות והחסרונות של שימוש בבקרת חיזוי מודל (MPC) לעומת בקרת פרופורציונלי-אינטגרלי-נגזרתי (PID) לאופטימיזציה של ביו-ריאקטורים.
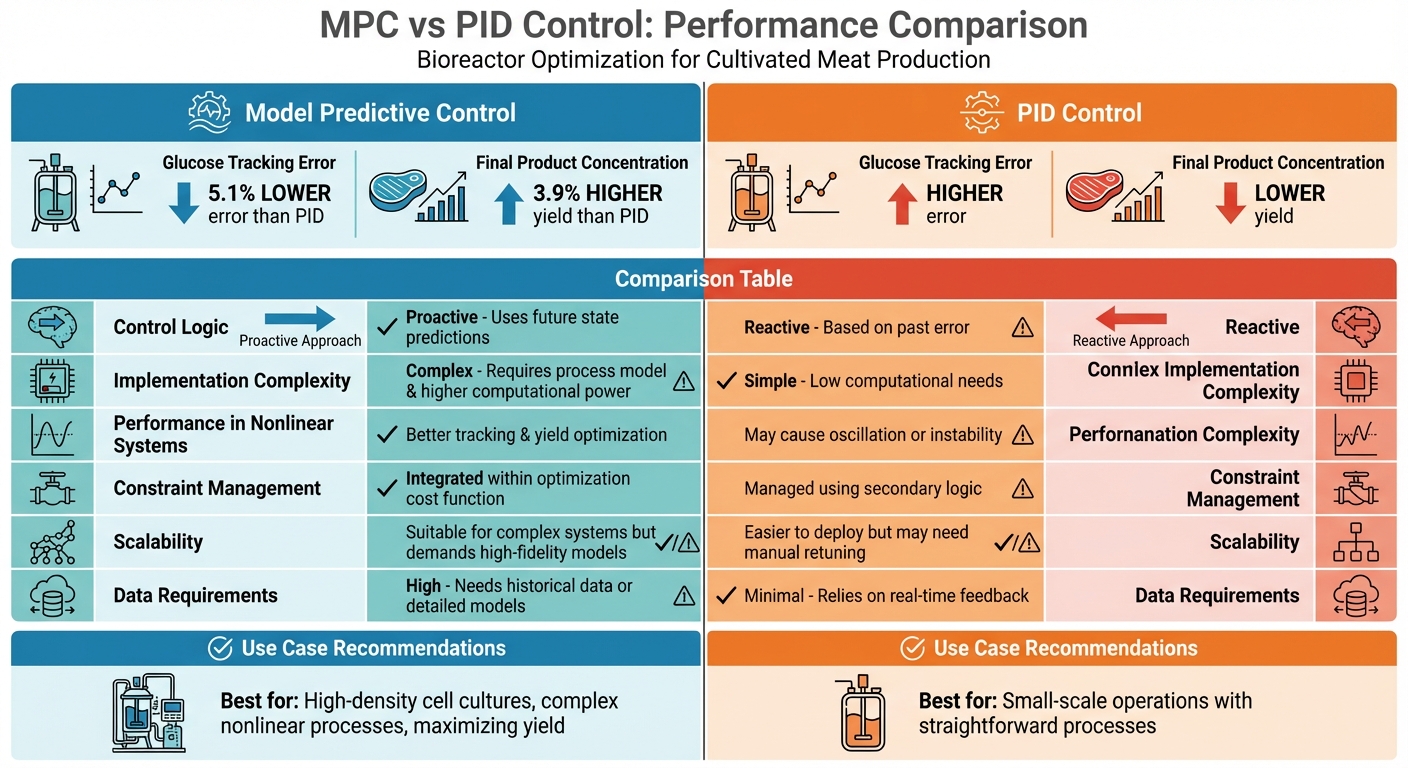
בביו-ריאקטורים של תאים יונקים במצב הזנה מחזורית, MPC עולה על אלגוריתמים PI מסורתיים על ידי הפחתת שגיאת המעקב אחר נקודת ההגדרה של ריכוז הגלוקוז ב-5.1% והגדלת ריכוז המוצר הסופי ב-3.9%[2]. יכולת חיזוי זו חשובה במיוחד במערכות בשר מתורבת, שבהן שמירה על רמות תזונה מדויקות מונעת היווצרות תוצרי לוואי מעכבים.
ההבדל הבסיסי בין שתי האסטרטגיות הללו הוא הגישה שלהן לשליטה. בקרת PID היא תגובתית , ומטפלת בסטיות רק לאחר שהן מתרחשות. לעומת זאת, MPC היא פרואקטיבית, ומשתמשת במודל תהליך כדי לחזות התנהגות עתידית ולהתאים את הקלטים בהתאם. עם זאת, ביצועים משופרים אלו מגיעים עם כמה פשרות.
MPC דורשת מודל תהליך מפורט ומשאבים חישוביים גדולים יותר, בעוד שבקרי PID פשוטים יותר ליישום. מערכות PID יכולות לפעול על בקרי לוגיקה מתוכנתים סטנדרטיים (PLCs) עם מינימום מודל, בעוד ש-MPC זקוקה למחשב אישי משולב עם בקר הביופרוסס[3][4]. קונסטנטינס דובנקובס מהמכון הכימי של מדינת לטביה מציין:
"MPC היא למעשה השיטה היחידה שיכולה לספק את השימוש במודלים מתמטיים בשליטה על תהליכים ביוטכנולוגיים באמצעות ציוד מחשב אישי סטנדרטי."[4]
להלן השוואה זה לצד זה של שתי הגישות:
| תכונה | בקרת PID מסורתית | בקרת חיזוי מודל (MPC) |
|---|---|---|
| לוגיקת בקרה | תגובתית; מבוססת על שגיאות עבר | פרואקטיבית; משתמשת בתחזיות מצב עתידיות |
| מורכבות יישום | פשוטה; דרישות חישוביות נמוכות | מורכבת; דורשת מודל תהליך וכוח חישוב גבוה יותר |
| ביצועים במערכות לא לינאריות | עשויה לגרום לאוסילציה או חוסר יציבות | מציעה מעקב טוב יותר ואופטימיזציית תפוקה |
| ניהול מגבלות | מנוהל באמצעות לוגיקה משנית | משולב בתוך פונקציית עלות אופטימיזציה |
| יכולת הרחבה | קל יותר לפרוס אך עשוי לדרוש כוונון ידני | מתאים למערכות מורכבות אך דורש מודלים ברמת דיוק גבוהה |
| דרישות נתונים | מינימלי; מסתמך על משוב בזמן אמת | גבוה; דורש נתונים היסטוריים או מודלים מפורטים |
השוואות אלו מדגישות את הפשרות בין פשטות לביצועים.הבחירה בין PID ל-MPC תלויה במידה רבה בהיקף הפעילות ובמשאבים הטכניים הזמינים.
סיכום
בקרת חיזוי מודלים (MPC) מציעה יתרון ברור על פני מערכות PID מסורתיות באופטימיזציה של ביצועי ביוריאקטורים, במיוחד בייצור בשר מתורבת. בתחום זה, שבו שליטה סביבתית מדויקת משפיעה ישירות על איכות המוצר והתפוקה, MPC מספקת יתרונות מדידים. לדוגמה, היא משפרת את דיוק המעקב אחר גלוקוז ב-5.1% ומגדילה את ריכוז המוצר הסופי ב-3.9% בהשוואה לגישות קונבנציונליות[2]. יכולת חיזוי זו היא קריטית במיוחד בתרביות תאים בצפיפות גבוהה, שבהן שמירה על איזון תזונתי מונעת הצטברות של תוצרי לוואי מזיקים.
MPC היא הפתרון המועדף כאשר יש למקסם את התפוקה או לנהל תהליכים מורכבים ולא ליניאריים. הוא מצטיין בטיפול בשונות גבוהה, רעש מדידה או מרווחי דגימה ממושכים, ומציע רמת חוסן שמערכות PID פשוט לא יכולות להתאים לה. עם זאת, עבור פעולות בקנה מידה קטן יותר עם תהליכים פשוטים, בקרת PID עשויה עדיין להיות בחירה חסכונית יותר. הניגוד בין הגישה הפרואקטיבית של MPC לטבע התגובתי של בקרת PID מדגיש את הערך האסטרטגי שלה בייצור בשר מתורבת בעל ביצועים גבוהים.
התקדמות בכוח המחשוב וכלים כמו טכנולוגיית ניתוח תהליכים (e.g. , ספקטרוסקופיית ראמאן וחיישני NIR) הפכו את יישום ה-MPC לנגיש יותר. טכנולוגיות אלו מאפשרות אופטימיזציה בזמן אמת באמצעות מערכות חומרה סטנדרטיות, ומפחיתות את המחסומים לאימוץ[5].
עבור יצרני בשר מתורבת, השגת חיישנים ביוריאקטוריים מיוחדים, מכשירים אנליטיים וציוד בקרה היא קריטית להטמעה מוצלחת של MPC. פלטפורמות כמו
MPC מייצג שינוי מכריע בבקרת ביוריאקטורים, מעבר ממערכות תגובתיות לגישה ניבויית, "איכות לפי עיצוב". כאשר ייצור בשר מתורבת עובר מהמעבדה לפעילות מסחרית, MPC ישחק תפקיד חיוני בשמירה על איכות מוצר עקבית תוך שיפור היעילות התפעולית. התפתחות זו מסמנת צעד משמעותי קדימה בביומנופקטורינג[3].
שאלות נפוצות
אילו נתונים וחיישנים נדרשים להפעלת MPC בביוריאקטור?
הפעלת בקרת ניבוי מודלים (MPC) בביוריאקטור כוללת שימוש בחיישנים למעקב אחר משתנים קריטיים בתהליך. אלה כוללים גורמים כמו ריכוזי מצע (כגון גלוקוז), רמות חמצן מומס, pH, טמפרטורה ומדידות ביומסה.כדי לשמור על שליטה מדויקת ויעילה, מערכות רכישת נתונים בזמן אמת חיוניות לניטור מתמשך של משתנים אלה.
כיצד בונים ומאמתים מודל MPC לתרביות תאים לא ליניאריות?
פיתוח ואימות מודל MPC לתרביות תאים לא ליניאריות מתחיל ביצירת מודל תהליך מדויק. ניתן לעשות זאת באמצעות משוואות עקרוניות או ניצול טכניקות למידת מכונה. השלב הבא כולל אימות המודל על ידי השוואת התחזיות שלו לנתונים ניסיוניים מביו-ריאקטורים. כל אי התאמות מטופלות על ידי כוונון פרמטרי המודל לשיפור הדיוק.
לאחר שהמודל משולב במסגרת MPC, הבקר עובר בדיקות בתוך ביו-ריאקטורים. באמצעות התאמות איטרטיביות, המערכת מכווננת כדי לקבוע אסטרטגיות הזנה שממקסמות את הביצועים תוך שמירה על מגבלות התהליך הנדרשות.
מתי PID עדיין מהווה בחירה טובה יותר מאשר MPC בייצור בשר מתורבת?
בקרת מודל חיזוי (MPC) היא יעילה מאוד בניהול הדינמיקה המורכבת והתנאים המשתנים של תהליכי ביוריאקטור בשר מתורבת, במיוחד כאשר נדרשת שליטה מדויקת. מצד שני, בקרת פרופורציונלית-אינטגרלית-נגזרתית (PID) היא לעיתים קרובות הבחירה הטובה יותר בשל פשטותה וקלות הכוונון שלה. PID מתאים במיוחד כאשר מודל דינמי אינו זמין או נדרש. הוא מתפקד היטב במערכות פשוטות שדורשות תגובות מהירות בזמן אמת, שבהן התכונות המתקדמות של MPC עשויות לא להציע יתרון נוסף.









