

Model Predictive Control (MPC) mengubah cara pengelolaan bioreaktor, terutama dalam produksi daging budidaya. Berbeda dengan sistem PID, yang bereaksi terhadap perubahan setelah terjadi, MPC memprediksi perilaku masa depan, memungkinkan penyesuaian yang tepat waktu. Pendekatan proaktif ini mengurangi variabilitas, meningkatkan hasil produk, dan memastikan konsistensi bahkan dalam skala besar.
Poin-poin penting:
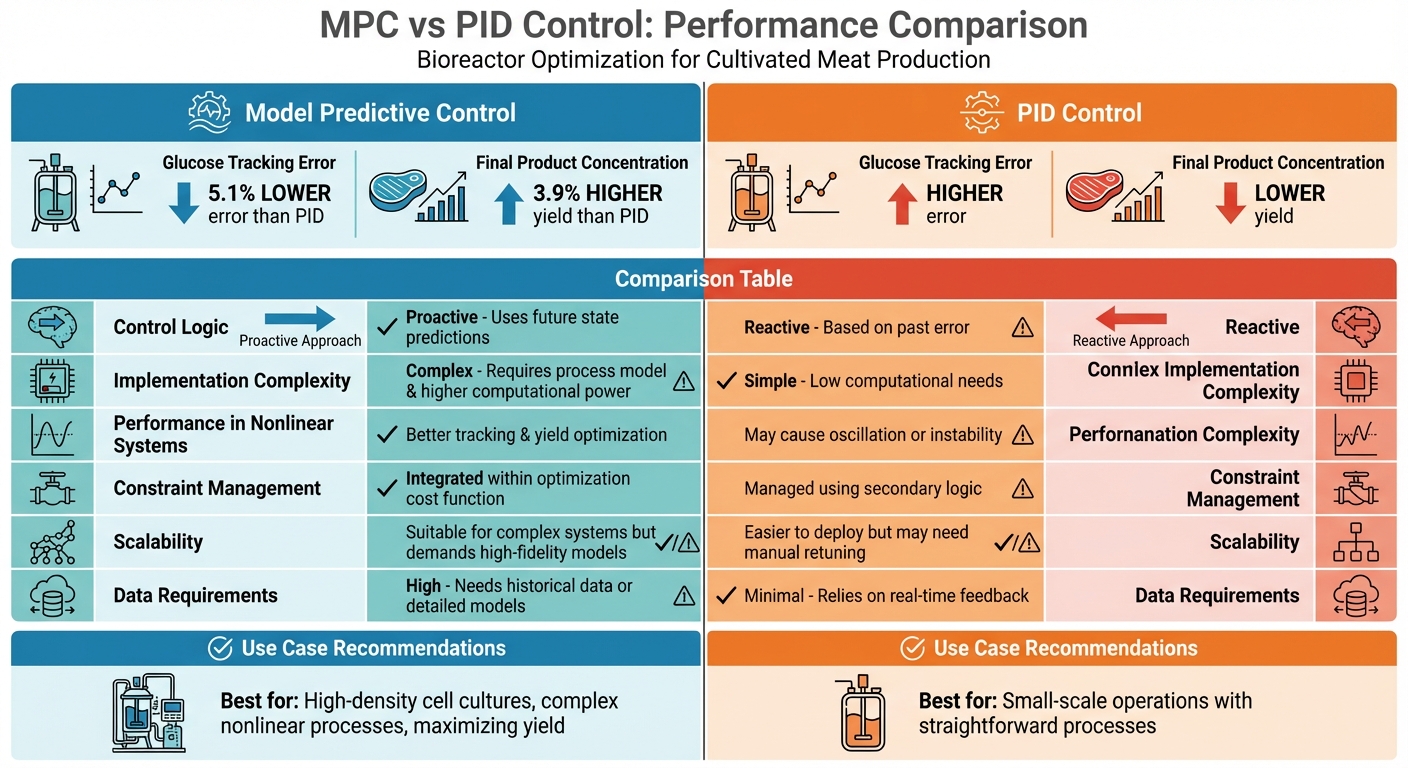
- MPC vs PID: MPC mengurangi kesalahan pelacakan glukosa sebesar 5,1% dan meningkatkan hasil protein sebesar 3,9% dibandingkan dengan sistem PID.
- Tantangan dengan PID: PID kesulitan dengan proses biologis nonlinier, penundaan, dan kondisi yang berubah, sering kali mengakibatkan osilasi atau ketidakefisienan.
- Manfaat MPC: Menangani gangguan, mengoptimalkan hasil, dan mendukung skalabilitas dengan mengintegrasikan alat pemantauan canggih seperti spektroskopi Raman.
- Hambatan Implementasi: MPC memerlukan model yang akurat dan sumber daya komputasi yang lebih tinggi, tetapi teknik seperti penyesuaian adaptif dan pemblokiran input membantu mengatasi tantangan ini.
Bagi produsen daging budidaya, MPC menawarkan cara yang kuat untuk mengelola bioproses yang kompleks, memastikan kontrol yang lebih baik atas tingkat nutrisi dan pembentukan produk sampingan. Sementara PID tetap menjadi pilihan untuk tugas yang lebih sederhana, MPC semakin menjadi pilihan utama untuk sistem yang dapat diskalakan dan berkinerja tinggi.
1. Model Predictive Control (MPC)
Kinerja di Bawah Gangguan
MPC menggunakan model matematika untuk memprediksi perilaku masa depan, memungkinkannya menyesuaikan variabel kontrol secara real-time. Ini membuatnya sangat efektif dalam bioreaktor yang menangani umpan masuk yang berfluktuasi, kebisingan sensor, dan penundaan dalam pengukuran.
Pada tahun 2021, peneliti dari Illinois Institute of Technology dan Amgen menguji kemampuan MPC untuk menangani gangguan. Mereka menemukan bahwa MPC meningkatkan pelacakan glukosa sebesar 5,1% dibandingkan dengan kontrol proporsional-integral (PI) tradisional saat mengelola variasi konsentrasi glukosa dan glutamin [2]. Sebelumnya, pada tahun 2014, tim Brian Glennon menerapkan Nonlinear Model Predictive Control (NMPC) pada bioreaktor percontohan 15 liter menggunakan sel mamalia CHO 320. Dengan mengintegrasikan spektroskopi Raman Kaiser RXN2 untuk pemantauan glukosa setiap enam menit, NMPC mempertahankan titik setel glukosa 11 mM yang stabil meskipun terdapat variabilitas proses yang signifikan dan kebisingan sensor [3].
Strategi MPC yang lebih baru terus mendorong batas. Pada bulan Maret 2026, Lipe Carmel dan Giacomo Sartori memperkenalkan strategi Multi-Inflow Control (MIC) untuk fermentasi Corynebacterium glutamicum. Pendekatan mereka, yang secara bersamaan menyesuaikan input nutrisi dan tingkat pengenceran, mengurangi overshoot sebesar 78,0% saat melacak setpoint biomassa 7,0, 13,0, dan 15,7 g/L dalam satu kali proses [6].
Penyesuaian proaktif ini tidak hanya menstabilkan variabel kunci tetapi juga membuka jalan untuk hasil keseluruhan yang lebih baik.
Optimasi Hasil
MPC mengalihkan fokus dari sekadar mempertahankan setpoint menengah ke memaksimalkan hasil akhir batch. Ini sangat penting untuk produksi daging budidaya, di mana mencapai hasil yang konsisten dan berkualitas tinggi dalam skala besar adalah tantangan utama.
Misalnya, tim Mudassir M. Rashid menunjukkan bahwa algoritma kontrol prediktif atribut kualitas kritis meningkatkan konsentrasi produk sebesar 3,9% pada akhir proses dibandingkan dengan metode konvensional [2]. Demikian pula, menggabungkan model pembelajaran mesin ke dalam sistem MPC telah menghasilkan peningkatan lebih dari 2% dalam produksi protein akhir dibandingkan dengan rata-rata historis [1].
Walaupun hasilnya menjanjikan, penerapan MPC memiliki tantangan tersendiri.
Kemudahan Implementasi
Terlepas dari keuntungannya, penerapan MPC dalam produksi daging budidaya memerlukan pengatasan hambatan yang signifikan. Efektivitas sistem bergantung pada model matematika yang akurat yang menangkap kompleksitas dinamika bioreaktor. Seperti yang dijelaskan oleh Touraj Eslami dan Alois Jungbauer:
"Efektivitas desain umpan balik apa pun pada dasarnya dibatasi oleh dinamika sistem dan akurasi model" [8].
Model nonlinier, meskipun kuat, membutuhkan sumber daya komputasi yang tinggi dan dapat menyebabkan penundaan dalam optimasi waktu nyata [8]. Selain itu, optimisasi non-konveks dari Nonlinear MPC dapat mengarah pada minimum lokal, mengkompromikan kinerja jika tidak diinisialisasi dengan benar [3]. Konstantins Dubencovs dan rekan-rekannya menyoroti kegunaan praktisnya:
"MPC secara praktis adalah satu-satunya metode yang dapat menyediakan penggunaan model matematika dalam pengendalian proses bioteknologi menggunakan peralatan PC standar" [4].
Strategi MPC adaptif menawarkan solusi dengan secara otomatis menyetel parameter pengendali untuk mengatasi variabilitas biologis [4] [5]. Mengintegrasikan Teknologi Analitik Proses (PAT), seperti spektroskopi Raman untuk pemantauan yang sering, mengurangi kebutuhan akan infrastruktur komputasi khusus [8] [3]. Teknik seperti 'pemblokiran input', yang mengelompokkan cakrawala waktu menjadi blok, juga membantu mengelola beban komputasi [8].
Skalabilitas untuk Produksi Daging Budidaya
Kemampuan MPC untuk mengelola gangguan dan mengoptimalkan hasil menjadikannya kandidat kuat untuk meningkatkan produksi daging budidaya. Ini telah membuktikan dirinya dalam proses biofarmasi dan mikroba, di mana ia memenuhi batasan proses yang ketat [1]. Untuk operasi skala besar, MPC mengatasi tantangan seperti transfer massa dan panas dengan menyesuaikan umpan substrat untuk memastikan pencampuran yang tepat, tingkat oksigen, dan pendinginan [5].
Manfaatnya jelas: kontrol nutrisi berbasis umpan balik telah meningkatkan titer antibodi monoklonal sebesar 1,7 kali lipat, sementara strategi prediktif telah mencegah kerugian produk sebesar 4,5–10% selama 30 hari [3] [7]. Brian Glennon dengan tepat merangkum keadaan saat ini:
"Kontrol bioproses masih dalam tahap awal dibandingkan dengan sektor kimia dan farmasi tradisional... sebagian disebabkan oleh tantangan yang terkait dengan kontrol bioreaktor: pemahaman proses yang buruk [dan] kurangnya pengukuran parameter proses yang relevan" [3].
Meskipun dengan tantangan ini, mengintegrasikan pembelajaran mesin ke dalam model perkiraan MPC menawarkan jalan ke depan. Kemajuan ini membantu mengimbangi ketiadaan model prinsip pertama yang sangat akurat, membuat MPC semakin cocok untuk tuntutan kompleks produksi daging budidaya [1]. Bagi perusahaan di bidang ini, platform seperti
2.PID Control dan Metode Tradisional Lainnya
Kinerja di Bawah Gangguan
Sementara Model Predictive Control (MPC) unggul dalam mengantisipasi perubahan, pengendali PID (proportional-integral-derivative) tradisional memiliki kelemahan yang signifikan. Pengendali PID, yang banyak digunakan dalam bioteknologi, beroperasi secara reaktif, artinya mereka hanya merespons setelah penyimpangan terjadi. Pendekatan reaktif ini kesulitan dengan sifat nonlinier dan ketergantungan waktu dari proses biologis, membuat PID kurang efektif dalam pengaturan seperti itu [5][9].
Masalah utama adalah bahwa sistem PID dengan parameter penyetelan tetap sering gagal mempertahankan stabilitas ketika dinamika proses berubah secara signifikan selama siklus kultivasi [5]. Misalnya, dalam kultur sel mamalia, penundaan pengukuran - kadang-kadang selama 24 jam - semakin mengurangi efektivitas PID [3]. Penundaan ini mencegah penyesuaian tepat waktu, yang mengarah pada osilasi atau kesalahan statis di lingkungan yang sangat non-linear [3].
Perbedaan kinerja antara PID dan MPC didukung oleh data. Dalam studi tahun 2021 oleh Mudassir M. Rashid, Satish J. Parulekar, dan Ali Cinar, sistem PID menunjukkan kesalahan pelacakan 5,1% lebih tinggi untuk titik set konsentrasi glukosa dibandingkan dengan MPC di bawah kondisi gangguan yang tidak diketahui dan kebisingan pengukuran [2]. Selain itu, sinyal PID sering terdistorsi oleh kebisingan bioreaktor dari proses aerasi, busa, dan pencampuran [5].
Optimasi Hasil
Salah satu tantangan inti PID adalah ketidakmampuannya untuk memprediksi pergeseran metabolik atau beradaptasi dengan perubahan konsentrasi substrat kritis. Keterbatasan ini sering kali menyebabkan masalah seperti "metabolisme berlebih", di mana substrat berlebih menghasilkan produk sampingan penghambat seperti asetat dalam E.coli atau laktat dan amonia dalam sel mamalia [5].
Dalam kultur sel mamalia - kunci produksi daging budidaya - metode pemberian makan tradisional gagal mempertahankan konsentrasi nutrisi rendah yang diperlukan untuk menghindari produk sampingan ini. Misalnya, mengontrol kadar glukosa dan glutamin masing-masing pada 0,3 mM dan 0,5 mM, dapat secara signifikan mengurangi produk sampingan yang menghambat, memotong amonia sebesar 74% dan laktat sebesar 63% [3]. Namun, mencapai tingkat presisi ini berada di luar kemampuan sistem PID standar.
Brian Glennon merangkum tantangannya:
"Kontrol bioproses masih dalam tahap awal...karena tantangan yang terkait dengan kontrol bioreaktor: pemahaman proses yang buruk, kurangnya pengukuran parameter proses yang relevan dan kesulitan yang melekat dalam mengendalikan bioproses yang dinamis, kompleks, dan non-linear" [3].
Kemudahan Implementasi
Terlepas dari keterbatasannya, PID tetap populer karena kesederhanaannya. Ini memerlukan daya komputasi minimal dan dapat diimplementasikan dengan peralatan standar [5]. Kebanyakan pengaturan mengandalkan mekanisme umpan balik tidak langsung, seperti pH-stat (menyesuaikan perubahan pH dari konsumsi nutrisi) atau DO-stat (merespons lonjakan oksigen terlarut ketika substrat habis). Namun, penskalaan sistem PID terhambat oleh kurangnya sensor online yang andal untuk mengukur konsentrasi biomassa atau substrat secara langsung [5].
Di banyak fasilitas skala kecil hingga menengah, penyesuaian manual terhadap profil pemberian makan - yang sering dilakukan pada interval 24 jam - masih umum dilakukan. Pendekatan ini bertentangan dengan inisiatif FDA Process Analytical Technology (PAT), yang menganjurkan kontrol otomatis secara real-time [4]. Intervensi manual ini semakin menyoroti tantangan dalam menerapkan PID dengan cara yang dapat diskalakan dan efisien.
Skalabilitas untuk Produksi Daging Budidaya
Seiring dengan peningkatan skala produksi, keterbatasan PID menjadi semakin jelas. Bioproses skala besar memerlukan penyesuaian pemberian substrat yang tepat untuk mengelola faktor-faktor seperti transfer massa, pencampuran, transfer panas, dan oksigenasi [5]. Parameter penyetelan tetap tidak dapat menangani fluktuasi proses yang signifikan yang terjadi selama proses fermentasi [5]. Behzad Moshiri menunjukkan:
"Metode kontrol konvensional tidak berhasil dalam tugas seperti [mengendalikan bioproses]... mereka sering tidak memadai untuk bioreaktor nonlinier yang sangat tidak stabil" [9].
Misalnya, dalam studi yang melibatkan produksi penisilin, sifat bioproses yang sangat nonlinier dan tidak stabil menyebabkan sistem PID tradisional gagal dalam mempertahankan pelacakan set-point yang efisien [9].
Dalam produksi daging budidaya, di mana konsistensi dan optimasi hasil sangat penting, keterbatasan ini menghadirkan tantangan besar. Sementara PID dapat menangani tugas yang lebih sederhana seperti kontrol pH atau oksigen terlarut, sifat reaktifnya dan ketidakmampuannya untuk mengelola dinamika nutrisi yang kompleks dan skala besar membuatnya tidak cocok untuk persyaratan lanjutan dari sistem produksi daging budidaya.
Kontrol Prediktif Model
sbb-itb-ffee270
Kelebihan dan Kekurangan
Sistem Kontrol MPC vs PID dalam Perbandingan Kinerja Bioreaktor
Memperluas perbandingan kinerja sebelumnya, bagian ini meneliti kelebihan dan kekurangan penggunaan Kontrol Prediktif Model (MPC) versus kontrol Proporsional-Integral-Derivatif (PID) untuk mengoptimalkan bioreaktor.
Dalam bioreaktor fed-batch sel mamalia, MPC mengungguli algoritma PI tradisional dengan mengurangi kesalahan pelacakan set-point konsentrasi glukosa sebesar 5,1% dan meningkatkan konsentrasi produk akhir sebesar 3,9%[2] . Kemampuan prediktif ini sangat penting dalam sistem daging budidaya, di mana menjaga tingkat nutrisi yang tepat mencegah pembentukan produk sampingan yang menghambat.
Perbedaan mendasar antara kedua strategi ini adalah pendekatan mereka terhadap kontrol. Kontrol PID reaktif, menangani penyimpangan hanya setelah terjadi. MPC, di sisi lain, proaktif, menggunakan model proses untuk memprediksi perilaku masa depan dan menyesuaikan input sesuai. Namun, peningkatan kinerja ini datang dengan beberapa kompromi.
MPC memerlukan pemodelan proses yang mendetail dan sumber daya komputasi yang lebih besar, sementara pengendali PID lebih sederhana untuk diterapkan. Sistem PID dapat berjalan pada Pengendali Logika yang Dapat Diprogram (PLC) standar dengan pemodelan minimal, sedangkan MPC memerlukan PC yang terintegrasi dengan pengendali bioproses[3][4]. Konstantins Dubencovs dari Institut Kimia Kayu Negara Latvia mencatat:
"MPC praktis merupakan satu-satunya metode yang dapat menyediakan penggunaan model matematika dalam pengendalian proses bioteknologi menggunakan peralatan PC standar."[4]
Berikut adalah perbandingan berdampingan dari dua pendekatan:
| Fitur | Kontrol PID Tradisional | Kontrol Prediktif Model (MPC) |
|---|---|---|
| Logika Kontrol | Reaktif; berdasarkan kesalahan masa lalu | Proaktif; menggunakan prediksi keadaan masa depan |
| Kompleksitas Implementasi | Sederhana; kebutuhan komputasi rendah | Kompleks; memerlukan model proses dan daya komputasi lebih tinggi |
| Kinerja dalam Sistem Nonlinear | Dapat menyebabkan osilasi atau ketidakstabilan | Menawarkan pelacakan yang lebih baik dan optimasi hasil |
| Manajemen Kendala | Dikelola menggunakan logika sekunder | Terintegrasi dalam fungsi biaya optimasi |
| Skalabilitas | Lebih mudah diterapkan tetapi mungkin memerlukan penyesuaian manual | Cocok untuk sistem kompleks tetapi membutuhkan model dengan ketelitian tinggi |
| Persyaratan Data | Minimal; bergantung pada umpan balik waktu nyata | Tinggi; membutuhkan data historis atau model terperinci |
Perbandingan ini menekankan pertukaran antara kesederhanaan dan kinerja.Pilihan antara PID dan MPC sangat bergantung pada skala operasi dan sumber daya teknis yang tersedia.
Kesimpulan
Model Predictive Control (MPC) menawarkan keunggulan yang jelas dibandingkan sistem PID tradisional dalam mengoptimalkan kinerja bioreaktor, terutama untuk produksi daging budidaya. Di bidang ini, di mana kontrol lingkungan yang tepat secara langsung mempengaruhi kualitas dan hasil produk, MPC memberikan manfaat yang terukur. Misalnya, ini meningkatkan akurasi pelacakan glukosa sebesar 5,1% dan meningkatkan konsentrasi produk akhir sebesar 3,9% dibandingkan dengan pendekatan konvensional[2]. Kemampuan prediktif ini sangat penting dalam kultur sel dengan kepadatan tinggi, di mana menjaga keseimbangan nutrisi mencegah penumpukan produk sampingan yang berbahaya.
MPC adalah solusi utama ketika memaksimalkan hasil atau mengelola proses yang kompleks dan non-linear.Ini unggul dalam menangani variabilitas tinggi, kebisingan pengukuran, atau interval pengambilan sampel yang diperpanjang, menawarkan tingkat ketahanan yang sistem PID tidak dapat tandingi. Namun, untuk operasi skala kecil dengan proses yang sederhana, kontrol PID mungkin masih menjadi pilihan yang lebih hemat biaya. Kontras antara pendekatan proaktif MPC dan sifat reaktif kontrol PID menyoroti nilai strategisnya dalam produksi daging budidaya berkinerja tinggi.
Kemajuan dalam daya komputasi dan alat seperti Teknologi Analisis Proses (e.g. , spektroskopi Raman dan sensor NIR) telah membuat penerapan MPC lebih mudah diakses. Teknologi ini memungkinkan optimasi waktu nyata menggunakan pengaturan perangkat keras standar, menurunkan hambatan adopsi[5].
Bagi produsen daging budidaya, mendapatkan sensor bioreaktor khusus, instrumen analitis, dan peralatan kontrol sangat penting untuk integrasi MPC yang sukses.Platform seperti
MPC mewakili pergeseran penting dalam kontrol bioreaktor, bergerak dari sistem reaktif ke pendekatan prediktif, "quality-by-design". Saat produksi daging budidaya meningkat dari laboratorium ke operasi komersial, MPC akan memainkan peran penting dalam menjaga kualitas produk yang konsisten sambil meningkatkan efisiensi operasional. Evolusi ini menandai langkah maju yang signifikan dalam biomanufaktur [3].
FAQ
Data dan sensor apa yang diperlukan untuk menjalankan MPC dalam bioreaktor?
Menjalankan Model Predictive Control (MPC) dalam bioreaktor melibatkan penggunaan sensor untuk melacak variabel proses kritis. Ini termasuk faktor-faktor seperti konsentrasi substrat (seperti glukosa), tingkat oksigen terlarut, pH, suhu, dan pengukuran biomassa.Untuk menjaga kontrol yang akurat dan efektif, sistem akuisisi data real-time sangat penting untuk memantau variabel-variabel ini secara terus-menerus.
Bagaimana cara membangun dan memvalidasi model MPC untuk kultur sel nonlinier?
Mengembangkan dan memvalidasi model MPC untuk kultur sel nonlinier dimulai dengan membuat model proses yang tepat. Ini dapat dilakukan menggunakan persamaan prinsip pertama atau memanfaatkan teknik pembelajaran mesin. Langkah berikutnya melibatkan validasi model ini dengan membandingkan prediksinya dengan data eksperimental dari bioreaktor. Setiap perbedaan diatasi dengan menyesuaikan parameter model untuk meningkatkan akurasi.
Setelah model diintegrasikan ke dalam kerangka kerja MPC, pengontrol menjalani pengujian dalam bioreaktor. Melalui penyesuaian iteratif, sistem disempurnakan untuk menetapkan strategi pemberian makan yang mengoptimalkan kinerja sambil tetap dalam batasan proses yang diperlukan.
Kapan PID masih menjadi pilihan yang lebih baik daripada MPC dalam produksi daging budidaya?
Kontrol prediktif model (MPC) sangat efektif untuk mengelola dinamika yang rumit dan kondisi yang berubah dalam proses bioreaktor daging budidaya, terutama ketika kontrol yang tepat sangat penting. Di sisi lain, kontrol proporsional-integral-derivatif (PID) sering kali menjadi pilihan yang lebih baik karena kesederhanaan dan kemudahan penyetelannya. PID sangat cocok ketika model dinamis tidak tersedia atau tidak diperlukan. Ini bekerja dengan baik dalam sistem yang sederhana yang membutuhkan respons cepat dan real-time, di mana fitur canggih dari MPC mungkin tidak menawarkan banyak manfaat tambahan.









