

Mallipohjainen ohjaus (MPC) muuttaa bioreaktoreiden hallintaa, erityisesti viljellyn lihan tuotannossa. Toisin kuin PID-järjestelmät, jotka reagoivat muutoksiin niiden tapahduttua, MPC ennustaa tulevia käyttäytymisiä, mahdollistaen tarkat säädöt reaaliajassa. Tämä ennakoiva lähestymistapa vähentää vaihtelua, parantaa tuotteen saantoa ja varmistaa johdonmukaisuuden jopa suurissa mittakaavoissa.
Tärkeimmät havainnot:
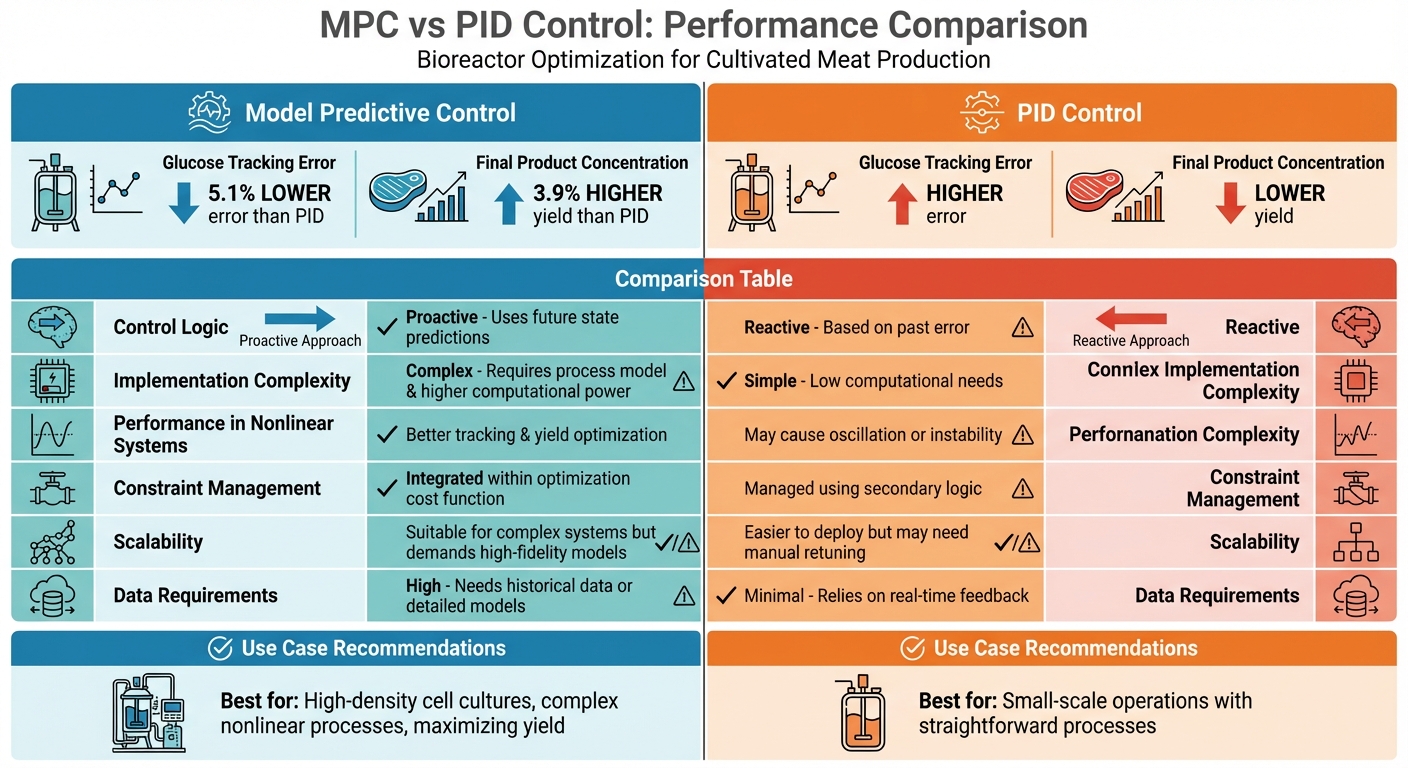
- MPC vs PID: MPC vähentää glukoosin seurannan virheitä 5.1% ja parantaa proteiinien saantoa 3.9% verrattuna PID-järjestelmiin.
- Haasteet PID:n kanssa: PID kamppailee epälineaaristen biologisten prosessien, viiveiden ja muuttuvien olosuhteiden kanssa, mikä usein johtaa värähtelyihin tai tehottomuuksiin.
- MPC:n edut: Käsittelee häiriöitä, optimoi saantoja ja tukee skaalautuvuutta integroimalla kehittyneitä seurantatyökaluja, kuten Raman-spektroskopiaa.
- Toteutuksen esteet: MPC vaatii tarkkoja malleja ja suurempia laskentaresursseja, mutta tekniikat kuten mukautuva viritys ja syötön estäminen auttavat ratkaisemaan näitä haasteita.
Viljellyn lihan tuottajille MPC tarjoaa vankan tavan hallita monimutkaisia bioprosesseja, varmistaen paremman hallinnan ravintoaineiden tasoista ja sivutuotteiden muodostumisesta. Vaikka PID on edelleen vaihtoehto yksinkertaisemmille tehtäville, MPC on yhä enemmän ensisijainen valinta skaalautuville, suorituskykyisille järjestelmille.
1. Mallipohjainen ennakoiva ohjaus (MPC)
Suorituskyky häiriöiden aikana
MPC käyttää matemaattisia malleja ennustamaan tulevaa käyttäytymistä, mikä mahdollistaa ohjausmuuttujien säätämisen reaaliajassa. Tämä tekee siitä erityisen tehokkaan bioreaktoreissa, jotka käsittelevät vaihtelevia syöttövirtoja, anturimelua ja mittausviiveitä.
Vuonna 2021, Illinois Institute of Technology ja Amgen -tutkijat testasivat MPC:n kykyä käsitellä häiriöitä. He havaitsivat, että se paransi glukoosin seurantaa 5.1% verrattuna perinteiseen PI-säätöön, kun hallittiin glukoosin ja glutamiinin pitoisuuksien vaihteluita [2]. Aiemmin, vuonna 2014, Brian Glennonin tiimi sovelsi epälineaarista mallipohjaista ennakoivaa säätöä (NMPC) 15 litran pilottibioreaktoriin käyttäen CHO 320 nisäkässoluja. Integroimalla Kaiser RXN2 Raman-spektroskopia glukoosin seurantaan kuuden minuutin välein, NMPC ylläpiti vakaan 11 mM glukoosiasetuspisteen merkittävästä prosessivaihtelusta ja anturimelusta huolimatta [3].
Uudemmat MPC-strategiat jatkavat rajojen rikkomista. Maaliskuussa 2026, Lipe Carmel ja Giacomo Sartori esittelivät Multi-Inflow Control (MIC) -strategian Corynebacterium glutamicum -fermentaatioille.Heidän lähestymistapansa, joka samanaikaisesti sääti ravinteiden syöttöä ja laimennusnopeuksia, vähensi ylilyöntiä 78.0% seuratessaan biomassan asetusarvoja 7,0, 13,0 ja 15,7 g/L yhdessä ajossa [6].
Nämä ennakoivat säädöt eivät ainoastaan vakauta keskeisiä muuttujia, vaan myös luovat edellytykset paremmalle kokonaistuotolle.
Tuottojen optimointi
MPC siirtää painopisteen pelkästä välitavoitteiden ylläpidosta lopullisten erätulosten maksimointiin. Tämä on ratkaisevaa viljellyn lihan tuotannossa, jossa johdonmukaisten, korkealaatuisten tulosten saavuttaminen suuressa mittakaavassa on suuri haaste.
Esimerkiksi Mudassir M. Rashidin tiimi osoitti, että kriittinen laatuominaisuus ennakoiva ohjausalgoritmi lisäsi tuotteen pitoisuutta 3.9% ajon lopussa verrattuna perinteisiin menetelmiin [2]. Samoin, koneoppimismallien sisällyttäminen MPC-järjestelmiin on johtanut yli 2% parannukseen lopullisessa proteiinituotannossa verrattuna historiallisiin keskiarvoihin [1].
Vaikka tulokset ovat lupaavia, MPC:n käyttöönotto tuo mukanaan omat haasteensa.
Helppokäyttöisyys
Huolimatta eduistaan, MPC:n käyttöönotto viljellyn lihan tuotannossa vaatii merkittävien esteiden voittamista. Järjestelmän tehokkuus riippuu tarkkojen matemaattisten mallien käytöstä, jotka kuvaavat bioreaktorin dynamiikan monimutkaisuutta. Kuten Touraj Eslami ja Alois Jungbauer selittävät:
"Minkä tahansa palautesuunnittelun tehokkuus on pohjimmiltaan rajoitettu järjestelmän dynamiikan ja mallin tarkkuuden mukaan" [8].
Epälineaariset mallit, vaikka ovatkin tehokkaita, vaativat suuria laskentaresursseja ja voivat aiheuttaa viiveitä reaaliaikaisessa optimoinnissa [8]. Lisäksi, Nonlinear MPC:n ei-konveksi optimointi voi johtaa paikallisiin minimeihin, mikä heikentää suorituskykyä, ellei sitä aloiteta oikein [3]. Konstantins Dubencovs ja kollegat korostavat sen käytännön hyötyä:
"MPC on käytännössä ainoa menetelmä, joka voi tarjota matemaattisten mallien käytön bioteknologisten prosessien ohjauksessa käyttäen tavallista PC-laitteistoa" [4].
Adaptiiviset MPC-strategiat tarjoavat ratkaisuja säätämällä automaattisesti säätimen parametreja biologisen vaihtelun huomioimiseksi [4] [5]. Prosessianalyyttisen teknologian (PAT) integrointi, kuten Raman-spektroskopia usein tapahtuvaan seurantaan, vähentää erikoistuneen tietojenkäsittelyinfrastruktuurin tarvetta [8] [3]. Tekniikat, kuten 'syötteen estäminen', jotka ryhmittelevät aikahorisontin lohkoihin, auttavat myös hallitsemaan laskennallista kuormitusta [8].
Skalautuvuus viljellyn lihan tuotannossa
MPC:n kyky hallita häiriöitä ja optimoida saantoja tekee siitä vahvan ehdokkaan viljellyn lihan tuotannon laajentamiseen. Se on jo osoittanut kykynsä biofarmaseuttisissa ja mikrobiprosesseissa, joissa se täyttää tiukat prosessirajoitukset [1]. Suurimittaisissa toiminnoissa MPC ratkaisee haasteita, kuten massa- ja lämmönsiirtoa, säätämällä substraattisyöttöjä varmistaakseen asianmukaisen sekoituksen, happitasot ja jäähdytyksen [5].
Hyödyt ovat selvät: palautepohjainen ravinteiden hallinta on lisännyt monoklonaalisten vasta-aineiden tiittereitä 1,7-kertaiseksi, kun taas ennakoivat strategiat ovat estäneet 4,5–10% tuotetappiot 30 päivän aikana [3] [7]. Brian Glennon tiivistää nykytilanteen osuvasti:
"Bioprosessien hallinta on lapsenkengissä verrattuna kemialliseen ja perinteiseen lääkesektoriin... osittain bioreaktorin hallintaan liittyvien haasteiden vuoksi: huono prosessin ymmärrys [ja] merkityksellisten prosessiparametrien mittaamisen puute" [3].
Vaikka näitä haasteita on, koneoppimisen integroiminen MPC-ennustemalleihin tarjoaa etenemissuunnan. Nämä edistysaskeleet auttavat kompensoimaan korkean tarkkuuden ensimmäisten periaatteiden mallien puutetta, mikä tekee MPC:stä yhä sopivamman viljellyn lihan tuotannon monimutkaisiin vaatimuksiin [1]. Tämän alan yrityksille alustat kuten
2.PID-säätö ja muut perinteiset menetelmät
Suorituskyky häiriöiden aikana
Vaikka mallipohjainen ennakoiva säätö (MPC) on erinomainen muutosten ennakoinnissa, perinteisillä PID (proportional-integral-derivative) -säätimillä on huomattavia haittoja. Biotekniikassa laajalti käytetyt PID-säätimet toimivat reaktiivisesti, mikä tarkoittaa, että ne reagoivat vasta poikkeamien jälkeen. Tämä reaktiivinen lähestymistapa kamppailee biologisten prosessien epälineaarisuuden ja aikaan sidotun luonteen kanssa, mikä tekee PID:stä vähemmän tehokkaan tällaisissa ympäristöissä [5][9].
Keskeinen ongelma on, että kiinteillä viritysparameetreilla varustetut PID-järjestelmät eivät usein pysty ylläpitämään vakautta, kun prosessidynamiikka muuttuu merkittävästi viljelysyklin aikana [5]. Esimerkiksi nisäkässoluviljelmissä mittausviiveet - joskus jopa 24 tuntia - vähentävät entisestään PID:n tehokkuutta [3]. Nämä viiveet estävät oikea-aikaiset säädöt, mikä johtaa värähtelyihin tai staattisiin virheisiin erittäin epälineaarisissa ympäristöissä [3].
PID:n ja MPC:n suorituskykyeroa tukevat tiedot. Vuoden 2021 tutkimuksessa, jonka tekivät Mudassir M. Rashid, Satish J. Parulekar ja Ali Cinar, PID-järjestelmät osoittivat 5.1% suurempaa seurantavirhettä glukoosipitoisuuden asetusarvoille verrattuna MPC:hen tuntemattomien häiriöiden ja mittauskohinan olosuhteissa [2]. Lisäksi PID-signaalit vääristyvät usein bioreaktorin melusta, joka johtuu ilmastuksesta, vaahdosta ja sekoitusprosesseista [5].
Saantojen optimointi
Yksi PID:n keskeisistä haasteista on sen kyvyttömyys ennustaa metabolisia muutoksia tai sopeutua kriittisten substraattipitoisuuksien muutoksiin. Tämä rajoitus johtaa usein ongelmiin, kuten "ylivuotometaboliaan", jossa ylimääräinen substraatti johtaa inhiboiviin sivutuotteisiin, kuten asetaattiin E.coli tai laktaatti ja ammoniakki nisäkässoluissa [5].
Nisäkässoluviljelmissä - keskeinen osa viljellyn lihan tuotantoa - perinteiset ruokintamenetelmät eivät pysty ylläpitämään matalia ravinnepitoisuuksia, jotka ovat tarpeen näiden sivutuotteiden välttämiseksi. Esimerkiksi glukoosin ja glutamiinin pitoisuuksien hallinta 0,3 mM ja 0,5 mM tasolla voi merkittävästi vähentää estäviä sivutuotteita, vähentäen ammoniakkia 74% ja laktaattia 63% [3]. Kuitenkin, tämän tason tarkkuuden saavuttaminen on standardi PID-järjestelmien kykyjen ulkopuolella.
Brian Glennon tiivistää haasteen:
"Bioprosessien hallinta on vielä lapsenkengissä...bioreaktorin hallintaan liittyvien haasteiden vuoksi: huono prosessin ymmärrys, merkityksellisten prosessiparametrien mittaamisen puute ja bioprosessien hallinnan vaikeudet, jotka ovat dynaamisia, monimutkaisia ja epälineaarisia" [3].
Helppo käyttöönotto
Rajoituksistaan huolimatta PID on edelleen suosittu yksinkertaisuutensa vuoksi. Se vaatii vain vähän laskentatehoa ja voidaan toteuttaa vakiolaitteilla [5]. Suurin osa kokoonpanoista perustuu epäsuoriin palautemekanismeihin, kuten pH-stat (säätää pH-muutoksia ravinteiden kulutuksesta) tai DO-stat (reagoi liuenneen hapen piikkeihin, kun substraatit ovat loppuneet). Kuitenkin PID-järjestelmien skaalausta haittaa luotettavien online-anturien puute biomassan tai substraattipitoisuuksien suoraan mittaamiseen [5].
Monissa pienistä ja keskikokoisista laitoksista syöttöprofiilien manuaaliset säädöt - jotka tehdään usein 24 tunnin välein - ovat edelleen yleisiä. Tämä lähestymistapa on ristiriidassa FDA:n Process Analytical Technology (PAT) -aloitteen kanssa, joka puoltaa reaaliaikaista, automatisoitua ohjausta [4]. Nämä manuaaliset toimenpiteet korostavat edelleen haasteita toteuttaa PID skaalautuvalla, tehokkaalla tavalla.
Skaalautuvuus viljellyn lihan tuotannossa
Kun tuotanto laajenee, PID:n rajoitukset tulevat entistä selvemmin esille. Suurimittaiset bioprosessit vaativat tarkkoja substraatin syöttösäätöjä hallitakseen tekijöitä, kuten massansiirtoa, sekoitusta, lämmönsiirtoa ja hapetusta [5]. Kiinteät viritysparametrit eivät pysty käsittelemään merkittäviä prosessivaihteluita, joita esiintyy fermentointiajojen aikana [5]. Behzad Moshiri huomauttaa:
"Perinteiset ohjausmenetelmät eivät onnistu tällaisessa tehtävässä [bioprosessien ohjaus]... ne ovat usein riittämättömiä erittäin epävakaille epälineaarisille bioreaktoreille" [9].
Esimerkiksi penisilliinituotantoon liittyvissä tutkimuksissa bioprosessien erittäin epälineaarinen ja epävakaa luonne aiheutti perinteisten PID-järjestelmien epäonnistumisen tehokkaan asetusarvon seurannan ylläpitämisessä [9].
Viljellyn lihan tuotannossa, jossa johdonmukaisuus ja saannon optimointi ovat kriittisiä, nämä rajoitukset aiheuttavat suuria haasteita. Vaikka PID pystyy käsittelemään yksinkertaisempia tehtäviä, kuten pH:n tai liuenneen hapen hallintaa, sen reaktiivinen luonne ja kyvyttömyys hallita monimutkaisia, laajamittaisia ravinnedynamiikkoja tekevät siitä sopimattoman viljellyn lihan tuotantojärjestelmien edistyneisiin vaatimuksiin.
Mallipohjainen ohjaus
sbb-itb-ffee270
Edut ja haitat
MPC vs PID-ohjausjärjestelmät bioreaktorin suorituskyvyn vertailussa
Laajentaen aiempia suorituskykyvertailuja, tässä osiossa tarkastellaan mallipohjaisen ohjauksen (MPC) ja suhteellinen-integraali-derivaatta (PID) ohjauksen etuja ja haittoja bioreaktorien optimoinnissa.
Imettäväisten solujen syöttöeräbioreaktoreissa MPC ylittää perinteiset PI-algoritmit vähentämällä glukoosipitoisuuden asetusarvon seurantavirhettä 5.1% ja lisäämällä lopputuotteen pitoisuutta 3.9% [2] . Tämä ennakoiva kyky on erityisen tärkeä viljellyissä lihajärjestelmissä, joissa tarkkojen ravintoainepitoisuuksien ylläpitäminen estää estävien sivutuotteiden muodostumisen.
Perusero näiden kahden strategian välillä on niiden lähestymistapa ohjaukseen. PID-ohjaus on reaktiivinen, käsitellen poikkeamia vasta niiden ilmettyä. MPC puolestaan on proaktiivinen, käyttäen prosessimallia ennustamaan tulevaa käyttäytymistä ja säätämään syötteitä sen mukaisesti. Tämä parantunut suorituskyky tuo kuitenkin mukanaan joitakin kompromisseja.
MPC vaatii yksityiskohtaista prosessimallinnusta ja suurempia laskentaresursseja, kun taas PID-ohjaimet ovat helpompia toteuttaa. PID-järjestelmät voivat toimia tavallisilla ohjelmoitavilla logiikkaohjaimilla (PLC) vähäisellä mallinnuksella, kun taas MPC tarvitsee PC:n integroituna bioprosessiohjaimeen[3][4]. Konstantins Dubencovs Latvian valtion puukemian instituutista huomauttaa:
"MPC on käytännössä ainoa menetelmä, joka mahdollistaa matemaattisten mallien käytön bioteknologisten prosessien hallinnassa käyttämällä tavallista PC-laitteistoa."[4]
Tässä on vertailu kahdesta lähestymistavasta vierekkäin:
| Ominaisuus | Perinteinen PID-säätö | Mallipohjainen ennakoiva säätö (MPC) |
|---|---|---|
| Säätölogiikka | Reaktiivinen; perustuu menneeseen virheeseen | Ennakoiva; käyttää tulevaisuuden tilan ennusteita |
| Toteutuksen monimutkaisuus | Yksinkertainen; alhaiset laskentatarpeet | Monimutkainen; vaatii prosessimallin ja suuremman laskentatehon |
| Suorituskyky epälineaarisissa järjestelmissä | Voi aiheuttaa värähtelyä tai epävakautta | Tarjoaa paremman seurannan ja tuoton optimoinnin |
| Rajoitusten hallinta | Hallitaan toissijaisella logiikalla | Integroitu optimointikustannusfunktioon |
| Skaalautuvuus | Helpompi ottaa käyttöön, mutta saattaa vaatia manuaalista hienosäätöä | Sopii monimutkaisille järjestelmille, mutta vaatii tarkkoja malleja |
| Datavaatimukset | Minimaalinen; perustuu reaaliaikaiseen palautteeseen | Korkea; tarvitsee historiallista dataa tai yksityiskohtaisia malleja |
Nämä vertailut korostavat yksinkertaisuuden ja suorituskyvyn välisiä kompromisseja.Valinta PID:n ja MPC:n välillä riippuu suurelta osin toiminnan laajuudesta ja käytettävissä olevista teknisistä resursseista.
Päätelmä
Model Predictive Control (MPC) tarjoaa selkeän edun perinteisiin PID-järjestelmiin verrattuna bioreaktorin suorituskyvyn optimoinnissa, erityisesti viljellyn lihan tuotannossa. Tällä alalla, jossa tarkka ympäristön hallinta vaikuttaa suoraan tuotteen laatuun ja saantoon, MPC tuo mitattavia etuja. Esimerkiksi se parantaa glukoosin seurannan tarkkuutta 5.1% ja lisää lopputuotteen pitoisuutta 3.9% verrattuna perinteisiin menetelmiin[2]. Tämä ennakoiva kyky on erityisen kriittinen suuritiheyksisissä soluviljelmissä, joissa ravintoaineiden tasapainon ylläpitäminen estää haitallisten sivutuotteiden kertymisen.
MPC on ensisijainen ratkaisu, kun halutaan maksimoida saanto tai hallita monimutkaisia, epälineaarisia prosesseja.Se erottuu edukseen käsitellessään suurta vaihtelua, mittauskohinaa tai pitkiä näytteenottovälejä, tarjoten tason kestävyyttä, jota PID-järjestelmät eivät yksinkertaisesti pysty vastaamaan. Kuitenkin pienemmän mittakaavan toiminnoissa, joissa on yksinkertaisia prosesseja, PID-säätö saattaa silti olla kustannustehokkaampi valinta. Kontrasti MPC:n ennakoivan lähestymistavan ja PID-säädön reaktiivisen luonteen välillä korostaa sen strategista arvoa huipputehokkaassa viljellyn lihan tuotannossa.
Laskentatehon edistysaskeleet ja työkalut, kuten prosessianalyyttinen teknologia (e.g. , Raman-spektroskopia ja NIR-anturit) ovat tehneet MPC:n käyttöönotosta helpommin saavutettavaa. Nämä teknologiat mahdollistavat reaaliaikaisen optimoinnin käyttäen standardilaitteistoja, mikä alentaa käyttöönoton esteitä[5].
Viljellyn lihan tuottajille erikoistuneiden bioreaktoriantureiden, analyyttisten instrumenttien ja säätölaitteiden hankinta on ratkaisevan tärkeää MPC:n onnistuneelle integroinnille.Alustat kuten
MPC edustaa keskeistä muutosta bioreaktorin ohjauksessa, siirtyen reaktiivisista järjestelmistä ennakoivaan, "laatu suunnittelun kautta" -lähestymistapaan. Kun viljellyn lihan tuotanto laajenee laboratoriosta kaupalliseen toimintaan, MPC:llä on olennainen rooli tuotteen laadun ylläpitämisessä samalla kun se parantaa toiminnan tehokkuutta. Tämä kehitys merkitsee merkittävää askelta eteenpäin biovalmistuksessa[3] .
Usein kysytyt kysymykset
Mitä tietoja ja antureita tarvitaan MPC:n käyttöön bioreaktorissa?
Model Predictive Control (MPC) -järjestelmän käyttö bioreaktorissa edellyttää antureiden käyttöä kriittisten prosessimuuttujien seuraamiseen. Näihin kuuluvat tekijät kuten substraattipitoisuudet (kuten glukoosi), liuenneen hapen tasot, pH, lämpötila ja biomassan mittaukset.Jotta voidaan ylläpitää tarkkaa ja tehokasta hallintaa, reaaliaikaiset tiedonkeruujärjestelmät ovat välttämättömiä näiden muuttujien jatkuvaan seurantaan.
Kuinka rakennat ja validoit MPC-mallin epälineaarisille soluviljelmille?
MPC-mallin kehittäminen ja validointi epälineaarisille soluviljelmille alkaa tarkan prosessimallin luomisella. Tämä voidaan tehdä käyttämällä ensimmäisen periaatteen yhtälöitä tai hyödyntämällä koneoppimistekniikoita. Seuraava vaihe sisältää tämän mallin validoinnin vertaamalla sen ennusteita bioreaktoreista saatuihin kokeellisiin tietoihin. Mahdolliset poikkeamat korjataan säätämällä mallin parametreja tarkkuuden parantamiseksi.
Kun malli on integroitu MPC-kehykseen, ohjain testataan bioreaktoreissa. Iteratiivisten säätöjen avulla järjestelmä hienosäädetään syöttöstrategioiden luomiseksi, jotka optimoivat suorituskyvyn pysyen samalla vaadituissa prosessirajoissa.
Milloin PID on edelleen parempi valinta kuin MPC viljellyn lihan tuotannossa?
Mallipohjainen ennakoiva säätö (MPC) on erittäin tehokas hallitsemaan viljellyn lihan bioreaktoriprosessien monimutkaisia dynamiikkoja ja muuttuvia olosuhteita, erityisesti silloin, kun tarkka säätö on välttämätöntä. Toisaalta, suhteellinen-integraali-derivaatta (PID) säätö on usein parempi valinta sen yksinkertaisuuden ja helpon virityksen vuoksi. PID sopii erityisesti silloin, kun dynaamista mallia ei ole saatavilla tai sitä ei tarvita. Se toimii hyvin yksinkertaisissa järjestelmissä, jotka vaativat nopeita, reaaliaikaisia vastauksia, joissa MPC:n kehittyneet ominaisuudet eivät välttämättä tarjoa paljon lisähyötyä.









