

Model Predictive Control (MPC) er ved at transformere, hvordan bioreaktorer styres, især inden for produktion af dyrket kød. I modsætning til PID-systemer, der reagerer på ændringer efter de er sket, forudsiger MPC fremtidige adfærd, hvilket muliggør præcise justeringer i realtid. Denne proaktive tilgang reducerer variation, forbedrer produktudbytte og sikrer konsistens selv i stor skala.
Vigtige punkter:
- MPC vs PID: MPC reducerer glukosesporingsfejl med 5,1% og forbedrer proteinafkast med 3,9% sammenlignet med PID-systemer.
- Udfordringer med PID: PID har svært ved ikke-lineære biologiske processer, forsinkelser og skiftende forhold, hvilket ofte resulterer i svingninger eller ineffektivitet.
- MPC Fordele: Håndterer forstyrrelser, optimerer udbytte og understøtter skalerbarhed ved at integrere avancerede overvågningsværktøjer som Raman-spektroskopi.
- Implementeringsudfordringer: MPC kræver nøjagtige modeller og højere computerressourcer, men teknikker som adaptiv tuning og inputblokering hjælper med at tackle disse udfordringer.
For producenter af dyrket kød tilbyder MPC en robust måde at styre komplekse bioprocesser på, hvilket sikrer bedre kontrol over næringsstofniveauer og biproduktdannelse. Mens PID forbliver en mulighed for enklere opgaver, er MPC i stigende grad det foretrukne valg for skalerbare, højtydende systemer.
1. Model Predictive Control (MPC)
Ydeevne under forstyrrelser
MPC bruger matematiske modeller til at forudsige fremtidig adfærd, hvilket gør det muligt at justere kontrolvariabler i realtid. Dette gør det særligt effektivt i bioreaktorer, der håndterer svingende indløbsstrømme, sensorstøj og måleforsinkelser.
I 2021 testede forskere fra Illinois Institute of Technology og Amgen MPC's evne til at håndtere forstyrrelser. De fandt, at det forbedrede glukosesporing med 5,1% sammenlignet med traditionel proportional-integral (PI) kontrol, når der blev håndteret variationer i glukose- og glutaminkoncentrationer [2]. Tidligere, i 2014, anvendte Brian Glennons team Nonlinear Model Predictive Control (NMPC) på en 15-liters pilotbioreaktor ved brug af CHO 320 pattedyrsceller. Ved at integrere Kaiser RXN2 Raman spektroskopi til glukoseovervågning hvert sjette minut, opretholdt NMPC et stabilt 11 mM glukosesætpunkt trods betydelig procesvariabilitet og sensorstøj [3].
Nyere MPC-strategier fortsætter med at skubbe grænser. I marts 2026 introducerede Lipe Carmel og Giacomo Sartori en Multi-Inflow Control (MIC) strategi for Corynebacterium glutamicum fermenteringer.Deres tilgang, som samtidig justerede næringsstofinput og fortyndingshastigheder, reducerede overskridelse med 78,0 %, når man sporede biomasse setpunkter på 7,0, 13,0 og 15,7 g/L i en enkelt kørsel [6].
Disse proaktive justeringer stabiliserer ikke kun nøglevariabler, men baner også vejen for bedre samlet udbytte.
Optimering af Udbytter
MPC flytter fokus fra blot at opretholde mellemliggende setpunkter til at maksimere endelige batchresultater. Dette er afgørende for produktion af dyrket kød, hvor det er en stor udfordring at opnå konsistente, høj-kvalitets resultater i stor skala.
For eksempel viste Mudassir M. Rashids team, at en kritisk kvalitetsattribut forudsigende kontrolalgoritme øgede produktkoncentrationen med 3,9 % ved slutningen af kørslen sammenlignet med konventionelle metoder [2]. På samme måde har inkorporering af maskinlæringsmodeller i MPC-systemer ført til en forbedring på over 2% i den endelige proteinproduktion sammenlignet med historiske gennemsnit [1].
Mens resultaterne er lovende, kommer implementeringen af MPC med sine egne udfordringer.
Lethed ved implementering
På trods af sine fordele kræver implementering af MPC i dyrket kødproduktion at overvinde betydelige forhindringer. Systemets effektivitet afhænger af nøjagtige matematiske modeller, der fanger kompleksiteten af bioreaktorens dynamik. Som Touraj Eslami og Alois Jungbauer forklarer:
"Effektiviteten af ethvert feedback-design er fundamentalt begrænset af systemdynamik og modelnøjagtighed" [8].
Ikke-lineære modeller, selvom de er kraftfulde, kræver høje computerressourcer og kan forårsage forsinkelser i realtidsoptimering [8]. Derudover kan Nonlinear MPC's ikke-konvekse optimering føre til lokale minima, hvilket kompromitterer ydeevnen, hvis den ikke er korrekt initialiseret [3]. Konstantins Dubencovs og kolleger fremhæver dens praktiske anvendelighed:
"MPC er praktisk talt den eneste metode, der kan muliggøre brugen af matematiske modeller i styringen af bioteknologiske processer ved hjælp af standard PC-udstyr" [4].
Adaptive MPC-strategier tilbyder løsninger ved automatisk at justere controller-parametre for at imødegå biologisk variabilitet [4] [5]. Integrering af Process Analytical Technology (PAT), såsom Raman-spektroskopi til hyppig overvågning, reducerer behovet for specialiseret computerinfrastruktur [8] [3]. Teknikker som 'input blocking', der grupperer tidshorisonten i blokke, hjælper også med at håndtere den beregningsmæssige belastning [8].
Skalerbarhed for Dyrket Kød Produktion
MPC's evne til at håndtere forstyrrelser og optimere udbytter gør det til en stærk kandidat til opskalering af dyrket kød produktion. Det har allerede bevist sit værd i biofarmaceutiske og mikrobielle processer, hvor det opfylder strenge proceskrav [1]. For storskala operationer tackler MPC udfordringer som masse- og varmeoverførsel ved at justere substrattilførsler for at sikre korrekt blanding, iltniveauer og køling [5].
Fordelene er klare: feedback-baseret næringsstofkontrol har øget monoklonale antistof titere med 1,7 gange, mens forudsigende strategier har forhindret 4,5–10% produktions tab over 30 dage [3] [7]. Brian Glennon opsummerer passende den nuværende tilstand:
"Kontrol af bioprocesser er i sin vorden sammenlignet med de kemiske og traditionelle farmaceutiske sektorer... delvist på grund af de udfordringer, der er forbundet med bioreaktorkontrol: dårlig procesforståelse [og] manglen på måling af relevante procesparametre" [3].
Selv med disse udfordringer tilbyder integration af maskinlæring i MPC-forudsigelsesmodeller en vej fremad. Disse fremskridt hjælper med at kompensere for fraværet af højpræcisions førsteprincipmodeller, hvilket gør MPC stadig mere egnet til de komplekse krav til produktion af dyrket kød [1]. For virksomheder i dette område tilbyder platforme som
2.PID-kontrol og andre traditionelle metoder
Ydelse under forstyrrelser
Mens Model Predictive Control (MPC) udmærker sig ved at forudse ændringer, har traditionelle PID (proportional-integral-derivative) controllere betydelige ulemper. PID-controllere, der er bredt anvendt i bioteknologi, opererer reaktivt, hvilket betyder, at de kun reagerer efter afvigelser opstår. Denne reaktive tilgang har svært ved at håndtere den ikke-lineære og tidsafhængige natur af biologiske processer, hvilket gør PID mindre effektiv i sådanne indstillinger [5][9].
Et centralt problem er, at PID-systemer med faste indstillingsparametre ofte ikke formår at opretholde stabilitet, når procesdynamikken ændrer sig betydeligt under en kultiveringscyklus [5]. For eksempel i pattedyrscellekulturer reducerer måleforsinkelser - nogle gange så lange som 24 timer - yderligere PID's effektivitet [3]. Disse forsinkelser forhindrer rettidige justeringer, hvilket fører til svingninger eller statiske fejl i stærkt ikke-lineære miljøer [3].
Ydelsesforskellen mellem PID og MPC understøttes af data. I en undersøgelse fra 2021 af Mudassir M. Rashid, Satish J. Parulekar og Ali Cinar viste PID-systemer en 5,1% højere sporingsfejl for glukosekoncentrationssæt-punkter sammenlignet med MPC under betingelser med ukendte forstyrrelser og målelyd [2]. Derudover forvrænges PID-signaler ofte af bioreaktorstøj fra beluftning, skum og blandingsprocesser [5].
Optimering af Udbytter
En af PID's kerneudfordringer er dens manglende evne til at forudsige metaboliske skift eller tilpasse sig ændringer i kritiske substratkoncentrationer. Denne begrænsning fører ofte til problemer som "overflow metabolism", hvor overskydende substrat resulterer i hæmmende biprodukter som acetat i E.coli eller laktat og ammoniak i pattedyrsceller [5].
I pattedyrscellekulturer - nøglen til produktion af dyrket kød - fejler traditionelle fodringsmetoder i at opretholde de lave næringsstofkoncentrationer, der er nødvendige for at undgå disse biprodukter. For eksempel kan kontrol af glukose- og glutaminniveauer på henholdsvis 0,3 mM og 0,5 mM betydeligt reducere hæmmende biprodukter, hvilket reducerer ammoniak med 74% og laktat med 63% [3]. Dog er det at opnå denne præcisionsgrad uden for standard PID-systemers kapabiliteter.
Brian Glennon indkapsler udfordringen:
"Kontrol af bioprocesser er i sin spæde start...på grund af de udfordringer, der er forbundet med bioreaktorkontrol: dårlig procesforståelse, manglen på måling af relevante procesparametre og vanskelighederne ved at kontrollere bioprocesser, som er dynamiske, komplekse og ikke-lineære" [3].
Lethed ved implementering
På trods af sine begrænsninger forbliver PID populær på grund af sin enkelhed. Det kræver minimal beregningskraft og kan implementeres med standardudstyr [5]. De fleste opsætninger er afhængige af indirekte feedbackmekanismer, som pH-stat (justering for pH-ændringer fra næringsforbrug) eller DO-stat (reagerer på opløste iltspidser, når substrater er opbrugt). Dog er skalering af PID-systemer hæmmet af manglen på pålidelige online sensorer til direkte måling af biomasse eller substratkoncentrationer [5].
I mange små til mellemstore faciliteter er manuelle justeringer af fodringsprofiler - ofte foretaget med 24-timers intervaller - stadig almindelige. Denne tilgang er i modstrid med FDA’s Process Analytical Technology (PAT) initiativ, som går ind for realtids, automatiseret kontrol [4]. Disse manuelle indgreb fremhæver yderligere udfordringerne ved at implementere PID på en skalerbar, effektiv måde.
Skalerbarhed for Dyrket Kødproduktion
Efterhånden som produktionen skaleres op, bliver PID's begrænsninger endnu mere tydelige. Storskala bioprocesser kræver præcise justeringer af substratfodring for at håndtere faktorer som massetransport, blanding, varmeoverførsel og iltning [5]. Faste indstillingsparametre kan ikke håndtere de betydelige procesudsving, der opstår under fermenteringsforløb [5]. Behzad Moshiri påpeger:
"Konventionelle kontrolmetoder lykkes ikke med sådan en opgave [kontrol af bioprocesser]... de er ofte utilstrækkelige for meget ustabile ikke-lineære bioreaktorer" [9].
For eksempel, i studier der involverer penicillinproduktion, forårsagede den meget ikke-lineære og ustabile natur af bioprocesser, at traditionelle PID-systemer fejlede i at opretholde effektiv setpunktsporing [9].
Inden for produktion af dyrket kød, hvor konsistens og optimering af udbytte er kritisk, præsenterer disse begrænsninger store udfordringer. Mens PID kan håndtere enklere opgaver som pH- eller opløst iltkontrol, gør dens reaktive natur og manglende evne til at håndtere komplekse, storskala næringsstofdynamikker den uegnet til de avancerede krav i dyrkede kødproduktionssystemer.
Model Predictive Control
sbb-itb-ffee270
Fordele og ulemper
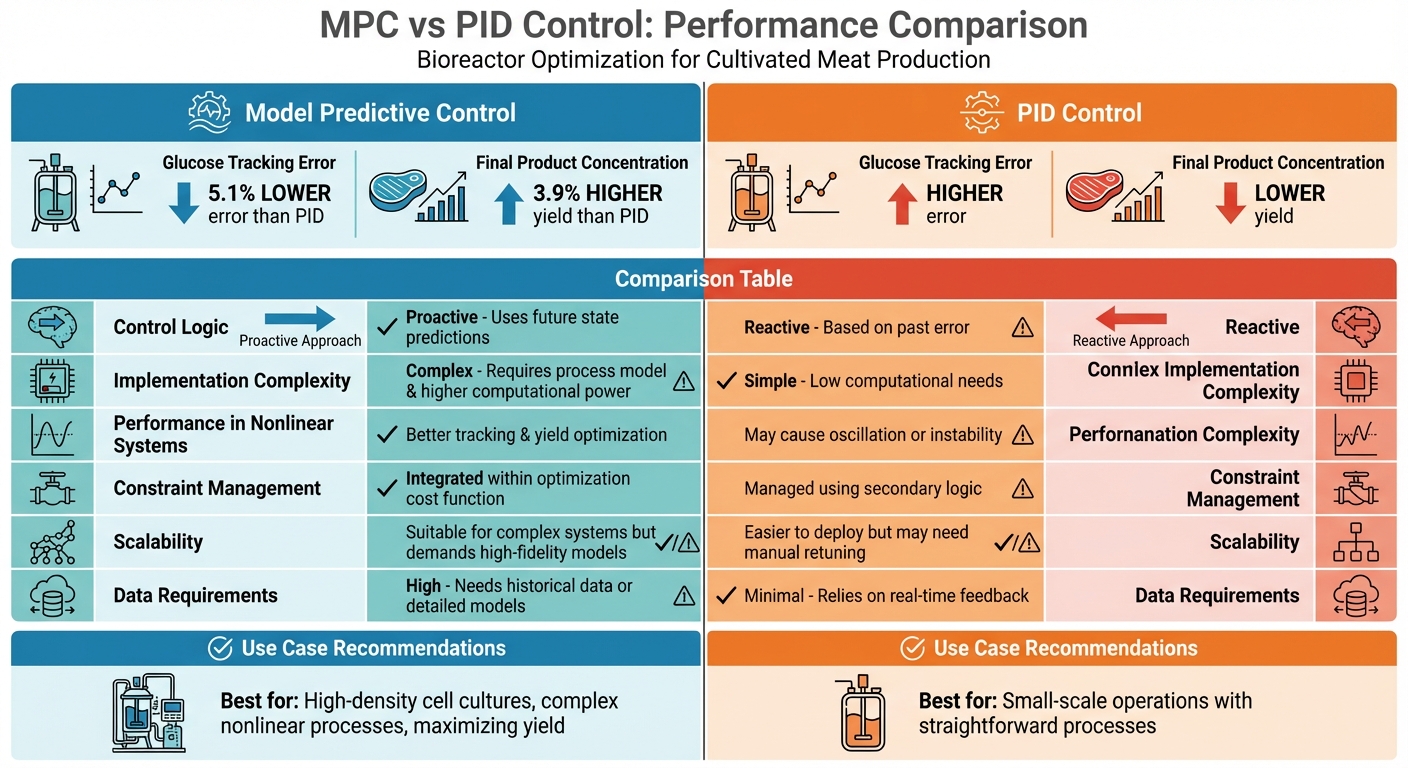
MPC vs PID kontrolsystemer i bioreaktor præstationssammenligning
Ved at udvide tidligere præstationssammenligninger undersøger dette afsnit fordele og ulemper ved at bruge Model Predictive Control (MPC) versus Proportional-Integral-Derivative (PID) kontrol til optimering af bioreaktorer.
I pattedyrs celle fed-batch bioreaktorer, MPC overgår traditionelle PI algoritmer ved at reducere glukosekoncentrationens setpunkt sporingsfejl med 5,1% og øge den endelige produktkoncentration med 3,9%[2] . Denne forudsigende evne er især vigtig i dyrkede kød systemer, hvor opretholdelse af præcise næringsstofniveauer forhindrer dannelsen af hæmmende biprodukter.
Den grundlæggende forskel mellem disse to strategier er deres tilgang til kontrol. PID-kontrol er reaktiv, og adresserer kun afvigelser, efter de opstår. MPC er derimod proaktiv, og bruger en procesmodel til at forudsige fremtidig adfærd og justere input derefter. Dog kommer denne forbedrede ydeevne med nogle kompromiser.
MPC kræver detaljeret procesmodellering og større computerressourcer, hvorimod PID-kontrollere er enklere at implementere. PID-systemer kan køre på standard programmerbare logiske controllere (PLC'er) med minimal modellering, mens MPC har brug for en PC integreret med bioprocescontrolleren[3][4]. Konstantins Dubencovs fra Latvian State Institute of Wood Chemistry bemærker:
"MPC er praktisk talt den eneste metode, der kan muliggøre brugen af matematiske modeller i styringen af bioteknologiske processer ved hjælp af standard PC-udstyr."[4]
Her er en side-om-side sammenligning af de to tilgange:
| Funktion | Traditionel PID-kontrol | Model Predictive Control (MPC) |
|---|---|---|
| Kontrologik | Reaktiv; baseret på tidligere fejl | Proaktiv; bruger fremtidige tilstandsforudsigelser |
| Implementeringskompleksitet | Simpel; lave beregningsbehov | Kompleks; kræver procesmodel og højere beregningskraft |
| Ydeevne i ikke-lineære systemer | Kan forårsage svingninger eller ustabilitet | Tilbyder bedre sporing og optimering af udbytte |
| Begrænsningsstyring | Håndteres ved hjælp af sekundær logik | Integreret i optimeringsomkostningsfunktionen |
| Skalerbarhed | Lettere at implementere, men kan kræve manuel justering | Egnet til komplekse systemer, men kræver højpræcisionsmodeller |
| Data Krav | Minimal; afhænger af realtidsfeedback | Høj; kræver historiske data eller detaljerede modeller |
Disse sammenligninger understreger afvejningerne mellem enkelhed og ydeevne.Valget mellem PID og MPC afhænger i høj grad af driftsomfanget og de tilgængelige tekniske ressourcer.
Konklusion
Model Predictive Control (MPC) tilbyder en klar fordel over traditionelle PID-systemer i optimering af bioreaktorens ydeevne, især for produktion af dyrket kød. På dette område, hvor præcis miljøkontrol direkte påvirker produktkvalitet og udbytte, leverer MPC målbare fordele. For eksempel forbedrer det glukosesporingsnøjagtigheden med 5,1% og øger den endelige produktkoncentration med 3,9% sammenlignet med konventionelle metoder[2]. Denne forudsigelsesevne er især kritisk i høj-densitets cellekulturer, hvor opretholdelse af næringsstofbalancen forhindrer ophobning af skadelige biprodukter.
MPC er den foretrukne løsning, når man maksimerer udbytte eller håndterer komplekse, ikke-lineære processer.Det udmærker sig ved at håndtere høj variabilitet, måleusikkerhed eller forlængede prøveintervaller, hvilket tilbyder en robusthed, som PID-systemer simpelthen ikke kan matche. Dog kan PID-kontrol stadig være et mere omkostningseffektivt valg for mindre operationer med enkle processer. Kontrasten mellem MPC's proaktive tilgang og den reaktive natur af PID-kontrol fremhæver dens strategiske værdi i højtydende produktion af dyrket kød.
Fremskridt inden for computerkraft og værktøjer som Process Analytical Technology (e.g. , Raman-spektroskopi og NIR-sensorer) har gjort MPC-implementering mere tilgængelig. Disse teknologier muliggør realtidsoptimering ved hjælp af standard hardwareopsætninger, hvilket sænker barriererne for adoption[5].
For producenter af dyrket kød er sourcing af specialiserede bioreaktorsensorer, analytiske instrumenter og kontroludstyr afgørende for en vellykket MPC-integration. Platforms like
MPC repræsenterer et afgørende skift i bioreaktorstyring, der bevæger sig fra reaktive systemer til en forudsigende, "quality-by-design" tilgang. Efterhånden som produktionen af dyrket kød skaleres fra laboratoriet til kommercielle operationer, vil MPC spille en væsentlig rolle i at opretholde en ensartet produktkvalitet, samtidig med at den driver operationel effektivitet. Denne udvikling markerer et betydeligt fremskridt inden for bioproduktion[3].
Ofte stillede spørgsmål
Hvilke data og sensorer er nødvendige for at køre MPC i en bioreaktor?
At køre Model Predictive Control (MPC) i en bioreaktor involverer brugen af sensorer til at spore kritiske procesvariabler. Disse inkluderer faktorer som substratkoncentrationer (såsom glukose), opløste iltniveauer, pH, temperatur og biomassemålinger. For at opretholde nøjagtig og effektiv kontrol er realtidsdataindsamlingssystemer essentielle for kontinuerligt at overvåge disse variable.
Hvordan bygger og validerer man en MPC-model for ikke-lineære cellekulturer?
Udvikling og validering af en MPC-model for ikke-lineære cellekulturer starter med at skabe en præcis procesmodel. Dette kan gøres ved hjælp af første-princip ligninger eller ved at udnytte maskinlæringsteknikker. Næste trin involverer validering af denne model ved at sammenligne dens forudsigelser med eksperimentelle data fra bioreaktorer. Eventuelle uoverensstemmelser adresseres ved at justere modelparametrene for at forbedre nøjagtigheden.
Når modellen er integreret i en MPC-ramme, gennemgår controlleren test i bioreaktorer. Gennem iterative justeringer finjusteres systemet for at etablere fodringsstrategier, der optimerer ydeevnen, mens de forbliver inden for de krævede procesbegrænsninger.
Hvornår er PID stadig et bedre valg end MPC i produktionen af dyrket kød?
Modelbaseret forudsigende kontrol (MPC) er yderst effektiv til at håndtere de komplekse dynamikker og skiftende forhold i bioreaktorprocesser for dyrket kød, især når præcis kontrol er afgørende. På den anden side er proportional-integral-derivativ (PID) kontrol ofte det bedre valg på grund af dens enkelhed og lette justering. PID er særligt velegnet, når en dynamisk model ikke er tilgængelig eller nødvendig. Den fungerer godt i enkle systemer, der kræver hurtige, realtidsreaktioner, hvor de avancerede funktioner i MPC måske ikke giver meget ekstra fordel.









